
در مهندسی سیستمهای کنترل، یک کنترلکننده تناسبی-انتگرالی و مشتق گیر (PID) فراوان به کار گرفته می شوند و در برخی کاربردها ضروری هستند. اغلب برای اطمینان از اینکه سیستم ها مطابق برنامه ریزی شده عمل می کنند استفاده می شود. محبوبیت کنترلر PID را می توان به اثربخشی، سادگی و قدرت آن نسبت داد که آن را به ابزاری حیاتی برای مهندسی و اتوماسیون تبدیل می کند. ز رایجترین نمونههای الگوریتم کنترل بازخوردی است که در بسیاری از فرایندهای کنترلی نظیر کنترل سرعت موتور DC، کنترل فشار، کنترل دما و… کاربرد دارد. کنترلکننده PID(پی آی دی) مقدار «خطا» بین خروجی فرایند و مقدار ورودی مطلوب (setpoint) محاسبه میکند. هدف کنترلکننده، به حداقل رساندن خطا با تنظیم ورودیهای کنترل فرایند است.
PID از سه قسمت مجزا به نامهای Proportional (تناسبی)،Integral (انتگرالگیر) و Derivative (مشتقگیر) تشکیل شده که هر کدام از آنها سیگنال خطا را به عنوان ورودی گرفته و عملیاتی را روی ان انجام میدهند و در نهایت خروجی شان با هم جمع میشود. خروجی این مجموعه که همان خروجی کنترلکننده PID است برای اصلاح خطا (error) به سیستم فرستاده میشود.
تفاوت بین نقطه تنظیم برنامه ریزی شده و متغیر فرآیند واقعی به عنوان مقدار خطای فعلی شناخته می شود و جزء متناسب یک کنترل کننده PID خروجی ای تولید می کند که دقیقاً متناسب با این مقدار است. اگر خطا باالا باشد واکنش متغیر تناسبی بزرگ خواهد بود و برعکس. حساسیت کنترلر به خطا توسط بهره تناسبی (Kp) تعیین می شود. اما کنترل P به خودی خود قادر به خلاص شدن از خطای حالت پایدار نیست، که منجر به آفست دائمی می شود.
خطای حالت پایدار توسط مولفه انتگرال حذف می شود، که به تدریج خطا را جمع می کند و خروجی کنترل کننده را اصلاح می کند. خطا در طول زمان جمع می شود و سپس در بهره انتگرال (Ki) ضرب می شود. با حصول اطمینان از اینکه خطای کل به صفر می رسد، هر جبرانی که ممکن است کنترل تناسبی پشت سر گذاشته باشد حذف می شود. از سوی دیگر، ناپایداری و نوسانات ممکن است ناشی از فعالیت انتگرالی بیش از حد باشد.
مولفه مشتق بر اساس نرخ تغییر آن، عدم دقت در آینده را پیشبینی میکند. با افزایش بهره مشتق (Kd) توسط خطاهای مشتق گیر در طول زمان، یک اثر میرایی ایجاد می کند. با انجام این کار، پاسخ نرم تر می شود و نوسانات و overshoot از حد کاهش می یابد. کنترلر مشتق گیر ، با این حال، مستعد نویز سیگنال خطا است و در صورت عدم مدیریت صحیح، ممکن است آن را تشدید کند.
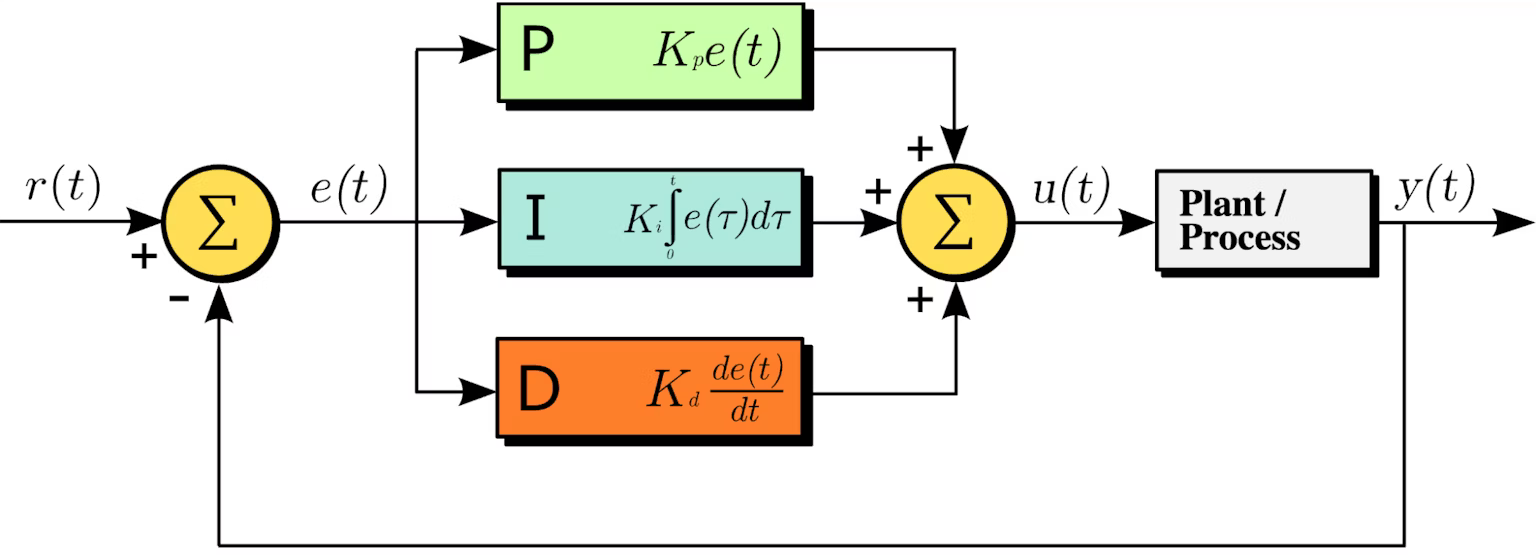
بلوک دیاگرام کنترلر PID
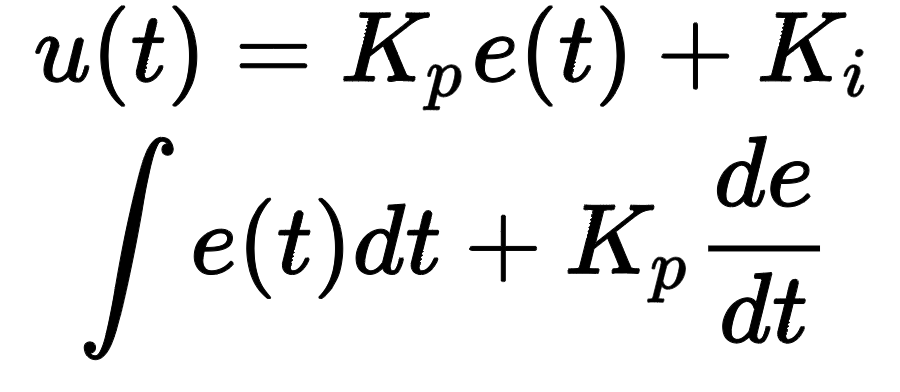
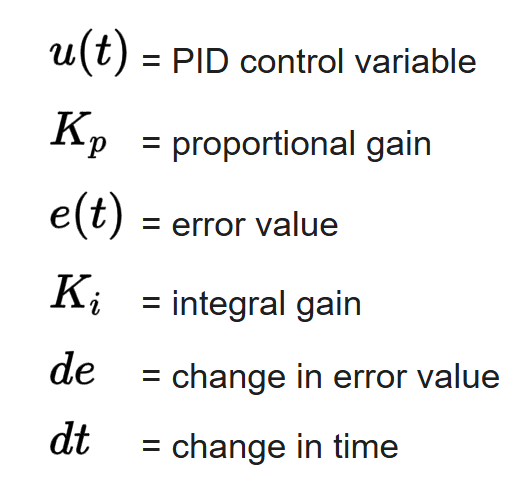
متغیر کنترل PID به صورت زیر تعریف می شود:

انیمیشن کنترلر PID
پیاده سازی کنترلر کننده های PID آنالوگ توسط اجزای مکانیکی یا الکتریکی مانند سلف ها، خازن ها و مقاومت ها انجام می شود. قبل از توسعه فناوری دیجیتال، آنها گسترش بیشتری داشتند. در حالی که کنترلرهای آنالوگ به دلیل سهولت استفاده و تأخیر کم مشهور هستند، تنظیم آنها نیز دشوار است و تطبیق پذیری ندارند.
کنترلرهای دیجیتال PID از الگوریتم هایی برای انجام عملیات کنترل بر روی ریزپردازنده ها یا میکروکنترلرها استفاده می کنند. آنها انعطافپذیری بیشتری را فراهم میکنند و تنظیم، تطبیق و پیادهسازی سیستمهای کنترل پیچیده را امکانپذیر میسازند. سیستمهای اتوماسیون بزرگتر میتوانند از کنترلکنندههای دیجیتالی استفاده کنند که قابلیتهای پیچیدهای مانند تنظیم خودکار و کنترل تطبیقی را ارائه میدهند.
کنترل دما: کنترل کننده های PID کاربرد گسترده ای در تنظیم سیستم های کنترل دما پیدا می کنند. برای مثال، کنترلکنندههای PID در سیستمهای HVAC (گرمایش، تهویه و تهویه مطبوع) دما را تنظیم میکنند تا اطمینان حاصل شود که دمای مناسب در اتاق همیشه حفظ میشود.
خطای نقطه تنظیم تفاوت بین نقطه تنظیم و دمای اتاق است که نشان می دهد چقدر باید گرم یا سرد شود. این با تنظیم دما در یک مقدار ثابت عمل می کند تا از میزان دما برای فرآیندهایی مانند پخت، بازپخت فلز(metal annealing) و در کارخانه های شیمیایی اطمینان حاصل شود.
کنترل فشار: در بسیاری از فرآیندهای صنعتی، نیاز است تا فشار ثابت باشد. کنترل کننده های PID در کاربردهایی مانند بویلرها، خطوط لوله گاز و سیستم های پنوماتیک برای تنظیم فشار در سیستم ها استفاده می شوند. به منظور حفظ فشار بخار مورد نظر در دیگ بخار در سطوح مناسب و ایمن، یک کنترل کننده PID ورودی سوخت را کنترل می کند. فشار ثابتی را در خطوط لوله گاز حفظ می کند تا از نشت و خرابی احتمالی در خطوط لوله گاز جلوگیری کند و علاوه بر این به تامین امنیت گاز کمک می کند.
کنترل سرعت: با توجه به نیازهای عملیاتی در کارخانه ها، موتورها و سایر ماشین ها نیاز به عملکرد مداوم دارند. کنترلرهای PID در درایوهای موتور برای تنظیم سرعت کار موتورهای الکتریکی استفاده می شود. در ماشین آلات CNC، واحدهای پالت سازی رباتیک و سایر سیستم های حمل و نقل قابل برنامه ریزی مانند نوار نقاله ها فرآیند و کیفیت دو پارامتر بسیار مهمی هستند که کنترل سرعت برای آنها از اهمیت بالایی برخوردار است.
کنترلکنندههای PID در خودروهای برقی برای کنترل سرعت موتور استفاده میشوند تا رانندگی راحتتر و صرفهجویی در رانندگی بهتر شود، زیرا میتوان سرعت موتور را به راحتی کنترل کرد تا امکان شتاب یا کاهش سرعت را فراهم کند.
کنترل سطح: کاربرد رایج کنترل کننده های PID در کنترل سطح سیال در مخازن مختلف است. در مخزن های آب، از کنترل کننده های PID برای تنظیم سطح آب ذخیره شده در مخازن استفاده می شود تا اطمینان حاصل شود که منبع یکنواخت وجود دارد. کارخانه های فرآیند شیمیایی سطوح واکنش دهنده های راکتور را در مقادیر مشخصی نگه می دارند تا شرایط راکتور را بهبود بخشند. الزامات کنترل سطح برای تنظیم نرخ جریان از طریق کنترل دقیق سطح استفاده می شود تا اطمینان حاصل شود که فرآیندهای پایین دست قطع نمی شوند یا سرریز اتفاق می افتد.
کنترل جریان آب: شیرها در فرآیندهایی مانند صنایع شیمیایی، آب و گاز بسیار مهم هستند. متغیرهای فرآیندی که دارای نرخ جریان متغیر از طریق راکتورها و خطوط لوله هستند با کنترل های PID کنترل می شوند. به عنوان مثال در یک تصفیه خانه آب، یک کنترل کننده PID مقدار مواد شیمیایی را که به آب تصفیه شده سرازیر می شود، تنظیم می کند تا بتواند سطوح شیمیایی خاصی را در آب تصفیه شده حفظ کند. به طور مشابه، در صنعت نفت، کنترلکنندههای PID، مقدار نفت خام را که از طریق خطوط لوله جریان مییابد، تنظیم میکنند تا از عرضه مطمئن و ثابت اطمینان حاصل کنند.
تولید: باید درک کرد که کنترلکنندههای PID در فرآیند حصول اطمینان از موثر بودن عملیاتی مانند قالبگیری تزریقی بسیار مهم هستند. آنها همچنین پارامترهایی را در خطوط مونتاژ مانند سرعت خطوط مونتاژ، حرکت بازوهای رباتیک و سایر مواد در اتوماسیون خطوط مونتاژ کنترل می کنند.
رباتیک: کنترلکنندههای PID در رباتیک به کار میروند تا اطمینان حاصل شود که موقعیت افکتکنندههای رباتیک و بازوهای متناسب با آن حفظ یا تغییر میکند. آنها اطمینان حاصل می کنند که ربات ها حرکات خاص مورد نیاز در کارهایی مانند جوشکاری، رنگ آمیزی و مونتاژ را انجام می دهند. کنترلکنندههای موقعیت امکان دستیابی به دقت و تکرارپذیری بالا را در رباتها فراهم میکنند، زیرا ورودیهای موتور به طور مداوم با استفاده از اطلاعات حسگرهای موقعیت تصحیح میشوند.
سیستم های دریایی: کنترلکنندههای PID در سیستمهای دریایی کاربرد دارند که در آن کنترلکننده حرکت و سرعت کشتیها را هدایت میکند. آنها دریچه گاز موتور و موقعیت سکان را کنترل می کنند تا باد و نیروهای موج را جبران کنند و مسیر و سرعت را ثابت نگه دارند. این امر مصرف اقتصادی سوخت و ناوبری و در نتیجه عملکرد کلی کشتی را تضمین می کند.
هوانوردی: برای حفظ شرایط پرواز ثابت، از کنترلرهای PID در سیستم های خلبان خودکار(Autopilot) در صنعت هواپیما استفاده می شود. برای تغییر جهت، سرعت و ارتفاع هواپیما، دریچه گاز و کنترل سطح را تنظیم می کنند. این امر با اطمینان از پرواز ثابت و روان، خستگی خلبان را کاهش می دهد و ایمنی را افزایش می دهد. کنترل کننده های PID همچنین در سیستم های کنترل، حالت فضاپیماها استفاده می شوند که جهت گیری فضاپیما را در طول ماموریت حفظ می کنند.
انرژیهای تجدیدپذیر: برای بهینهسازی راندمان در سیستمهای انرژی تجدیدپذیر مانند پنلهای خورشیدی و توربینهای بادی، کنترلکنندههای PID سرعت روتور و ردیابی خورشید را تغییر میدهند. به منظور به حداکثر رساندن استخراج انرژی و محافظت از توربین در برابر آسیب در بادهای شدید، کنترلکنندههای PID در توربینهای بادی، گشتاور ژنراتور و گام پره را تنظیم میکنند. سیستمهای ردیاب خورشیدی با اطمینان از اینکه پنلها همیشه در معرض بیشینه قرارگیری در برابر خورشید قرار دارند، کارایی انرژی را افزایش میدهند.
کنترلرهای PID برای حفظ کارایی و پایداری در عملیات صنعتی ضروری هستند. برای نمونه، برای تضمین ادامه واکنش با بهترین سرعت ممکن در یک کارخانه شیمیایی، یک کنترل کننده PID ممکن است بر میزان جریان واکنش دهنده ها به یک راکتور نظارت کند.
به منظور کاهش خطا، به طور مداوم متغیر فرآیند (سرعت جریان) را اندازه گیری می کند و متغیر کنترل (موقعیت شیر) را اصلاح می کند. با انجام این کار، تضمین میکند که رویه در محدوده مورد نظر اجرا میشود و کالیبره محصول نهایی را افزایش میدهد و تلفات را کاهش میدهد.
سادگی: ساده برای درک و پیاده سازی.
اثربخشی: قادر به مدیریت انواع مسائل کنترلی است.
ماندگاری: قادر به عملکرد صحیح علیرغم تغییرات در سیستم است.
انعطاف پذیری: قابل انطباق با انواع مختلف سیستم ها و رویه ها.
پیچیدگی تنظیم: تعیین ثابت بهره های ایده آل (Kp، Ki، و Kd) می تواند دشوار و زمان بر باشد.
عملکرد در سیستمهای غیرخطی: کنترلکنندههای PID ممکن است با سیستمهایی که ویژگی های غیرخطی بالایی دارند نتواند کار کند.
حساسیت به نویز: نویز فرکانس بالای سیگنال خطا ممکن است از طریق کنترل مشتق تقویت شود.
قابلیت پیش بینی اندک: بر اساس روندهای تاریخی، آنها به خطاها پاسخ می دهند اما قادر به پیش بینی خطاهای تازه نیستند.
اولین استراتژی در هنگام تنظیم یک کنترلر PID استفاده از کنترلر تناسبی است. با Ki و Kd برابر با صفر، شروع به بالا بردن Kp تا نقطه ای کنید که در آن یک نوسان پایدار سیستم مشاهده شود. این به شما کمک می کند بفهمید که چگونه بهره متناسب بر پاسخ سیستم کلی تأثیر می گذارد.
سطح بعدی کنترلر انتگرال گیر است که برای حذف خطای حالت پایدار استفاده می شود. به تدریج Ki را افزایش دهید، اما ممکن است مقداری احتیاط برای کنترلرانتگرال گیر لازم باشد، تا منجر به بی ثباتی سیستم نشود.
سپس کنترل مشتق را برای افزودن پایداری بیشتر و کاهش overshoot اعمال کنید. Kd را اصلاح کنید تا به یک پاسخ تعادلی مطلوب دست یابید.
استفاده از برخی روشهای مشخص برای تنظیم سادهشده را در نظر بگیرید، برای نمونه، کوهن-کون یا زیگلر-نیکلز، یا شاید سعی کنید راهحلهای تنظیم خودکار مبتنی بر نرمافزار را پیادهسازی کنید.
در نهایت، کالیبره و تنظیمات لازم را در تنظیمات خود در شرایط واقعی انجام دهید. به منظور دستیابی به سطح عملکرد بهینه، در صورت لزوم، تنظیمات بیشتری را انجام دهید.
صنعت ۴٫۰: اهمیت فزاینده کنترل کننده های PID. برای توسعه از فناوری هایی مانند هوش مصنوعی، یادگیری ماشینی و اینترنت اشیا استفاده می کند. این پیشرفت ها به طرق مختلف برای کنترل کننده های PID مفید است. کنترل تطبیقی ممکن است مستلزم کنترلکنندههای PID باشد که به طور مداوم پارامترها را برای افزایش عملکرد و سرعت تغییر میدهند.
دادههای PID در تعمیر و نگهداری پیشبینیکننده استفاده میشود که هدف آن برنامهریزی تعمیر تجهیزات است تا کارخانه متوقف نشود. اولویت دوم افزایش کارایی و ساده کردن فرآیندها با اتصال چیزها از طریق اینترنت اشیا (IoT) برای کنترل آنها از راه دور است.
علاوه بر این، بر اساس بهینه سازی هوش مصنوعی، تنظیمات PID به صورت پویا تغییر می کند تا اطمینان حاصل شود که سیستم ها با بیشینه کارایی کار می کنند. این پیشرفتها تضمین میکند که کنترلکنندههای PID در محیط های صنعتی شبکهشده و هوشمند در آینده حیاتی باقی خواهند ماند.
کنترلرهای PID (Proportional-Integral-Derivative) کنترل دقیق و کارآمدی را در اتوماسیون صنعتی فراهم می کنند. آنها شرایط بهینه مانند دما و فشار را مدیریت می کنند و نوسانات را کاهش می دهند تا خروجی پایدار داشته باشند. آنها نوسانات را از بین می برند و مصرف انرژی در گرمایش، سرمایش و سایر فرآیندها را کاهش می دهند.
فرآیندهای کاملاً خودکار را ارائه می دهد و نیازی به مداخله دستی نیست. آنها عملکرد پایدار را در سیستم های پیچیده ارائه می دهند و می توانند برای پویایی های مختلف سیستم سفارش سازی شوند. مهمترین کاربرد های آن شامل صنایعی مانند تولید، فرآوری شیمیایی، نفت و گاز و تولید مواد غذایی است.
کنترلکنندههای PID که به دلیل انعطافپذیری، سادگی و سازگاری بسیار سودمند هستند، همچنان ابزاری حیاتی در مهندسی سیستمهای کنترل هستند. استفاده از پتانسیل کامل آنها مستلزم درک اصول اقدامات کنترل متناسب، انتگرال، و مشتق، و همچنین تمایز بین کنترلرهای آنالوگ و دیجیتال و کاربردهای عملی آنها است.
اگرچه تنظیم کنترلر PID ممکن است دشوار باشد، ولی استفاده از تکنیک مناسب کارایی بالا را تضمین می کند. قابلیتهای آتی کنترلکنندههای PID با ادغام فناوریهای پیشرفته بیشتر خواهد شد، که انتظار میرود با تغییر روند صنعت، آنها را حتی بیشتر ضروری کند.
بسیاری از صنایع از خدمات شرکت مهندسی فریان برای دستیابی به اهداف زیست محیطی، اقتصادی و تولیدی خود استفاده می کنند. با ما تماس بگیرید تا دریابید که کدام خدمات به بهترین وجه به برنامه شما کمک می کنند و چگونه می توانیم آن را برای رفع نیازهای شما به کار بگیریم.













