

کنترلکننده منطقی قابل برنامهریزی SIMATIC S7-1500 PLC میتواند بهصورت یکپارچه با سیستمهای سروو درایو SINAMICS S200 PN ادغام شود تا عملکردی بینظیر ارائه دهد و کاربران را به قابلیتهای دقیق کنترل موقعیت و سرعت مجهز کند؛ قابلیتهایی که برای دستیابی به کنترل حرکتی پیشرفته در اتوماسیون صنعتی ضروری هستند. در این آموزش، شما به جزئیات کنترل سرعت از طریق بلوک تابع SinaSpeed پرداخته و همچنین با دستورالعملهای دقیق برای دستیابی به کنترل موقعیت دقیق با استفاده از شیء فناوری (Technology Object) آشنا میشوید و در نهایت به راه اندازی سروو درایو زیمنس Sinamics پرداخته می شود.
شکل ۱٫۱ یک نمایش تصویری ارائه میدهد که وظیفهی اتوماسیون را تشریح کرده و نمایی جامع از ساختار و اجزای آن را نشان میدهد.
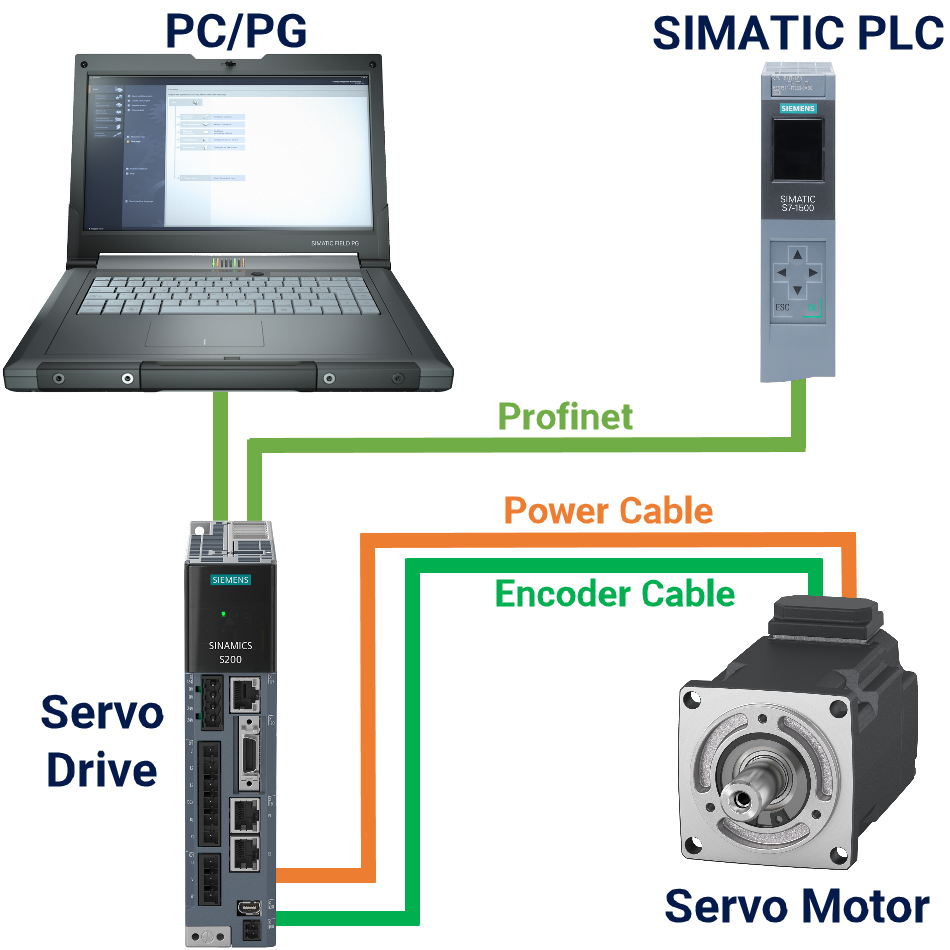
شکل ۱-۱ کنترل سرعت و موقعیت سروو درایو زیمنس – نمای کلی اتوماسیون
مواردی که برای دنبال کردن این آموزش به آنها نیاز دارید:
این بخش از آموزش، پیکربندی سختافزار را معرفی میکند. در اینجا دستورالعملهای دقیقی ارائه شدهاند تا از اجرای موفق فرآیند اطمینان حاصل شود.
برای شروع، نرمافزار TIA Portal را اجرا کنید، یک پروژه جدید از ابتدا ایجاد کنید، و واحد پردازش مرکزی (CPU) مورد نظر خود، مانند CPU 1511T-1 PN را برای ادامهی توسعه به پروژه اضافه کنید.
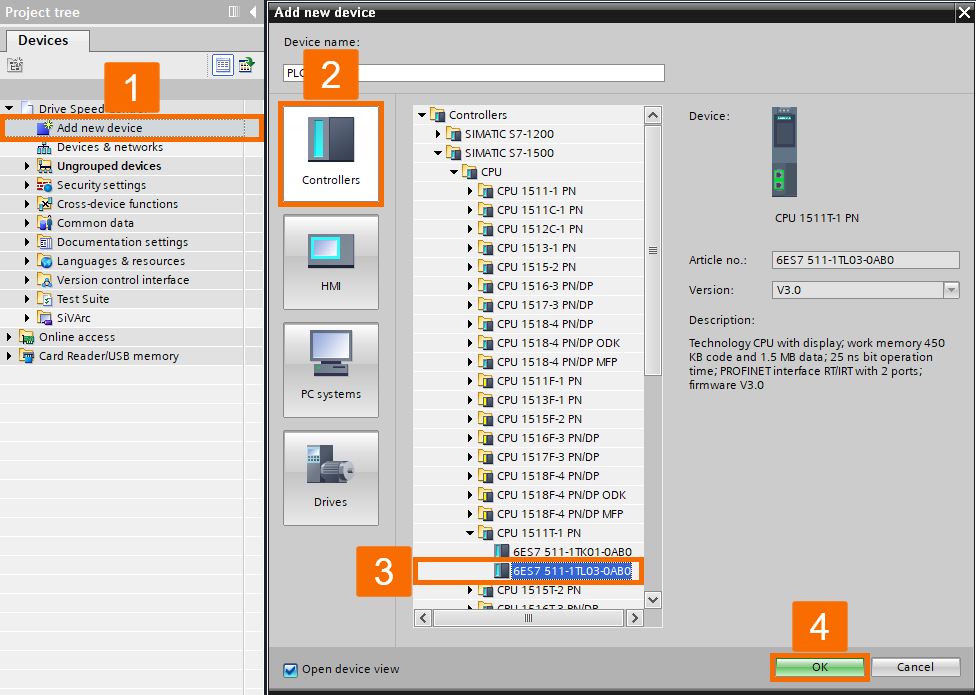
شکل ۲-۱-کنترل سرعت سروو درایو زیمنس – افزودن PLC به پروژه
بر روی گزینهی “Add new device” در درخت پروژه دوبار کلیک کنید تا پنجرهی پاپآپ باز شود. در داخل این پنجره، دستهبندی “Drives” را انتخاب کرده و در فهرست “Drives & starters”، درایو S200 مورد نظر خود را پیدا کنید. پس از یافتن، اطمینان حاصل کنید که نسخهی Firmware صحیح است و سپس نام دستگاه را به “S200 PN” تغییر دهید. در نهایت، با فشردن دکمهی “OK”، درایو را به پروژهی TIA اضافه کنید.
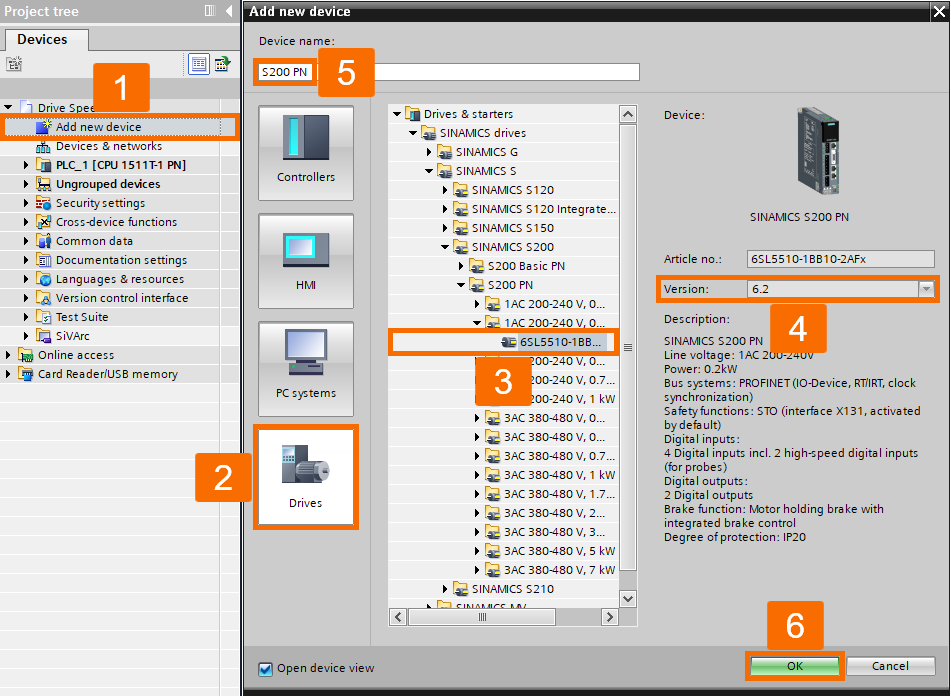
شکل ۲-۲- کنترل سرعت سروو درایو زیمنس – افزودن درایو مورد نظر به پروژه
تنظیمات امنیتی موجود در این برنامه را نادیده بگیرید و به جای آن، گزینه “Continue with low-security settings” را انتخاب کنید تا هرگونه محدودیت را دور بزنید. زمانی که پنجره “Warning” ظاهر شد، دکمه “OK” را فشار دهید تا ادامه دهید.
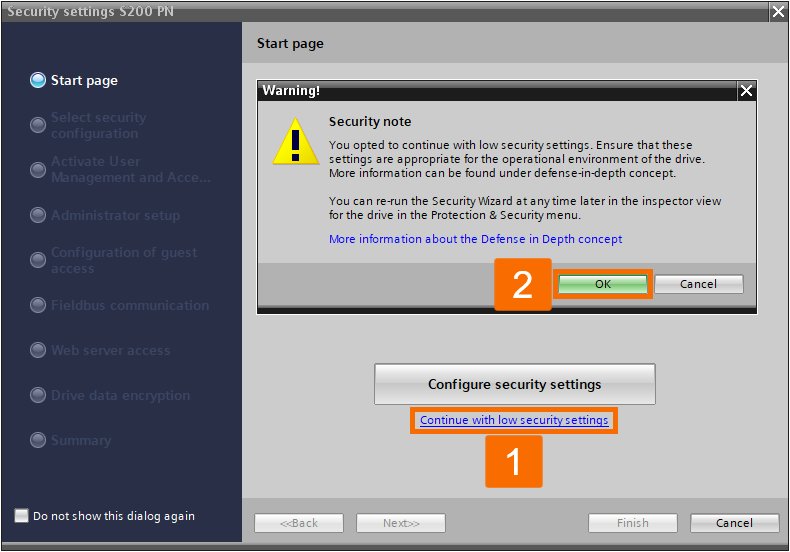
شکل ۲-۳- کنترل سرعت سروو درایو زیمنس – پیکربندی تنظیمات امنیت پایین برای درایو
در نهایت، در بخش “Summary” پنجرهی تنظیمات امنیتی، دکمه “Finish” را فشار دهید تا فرآیند تکمیل شود.
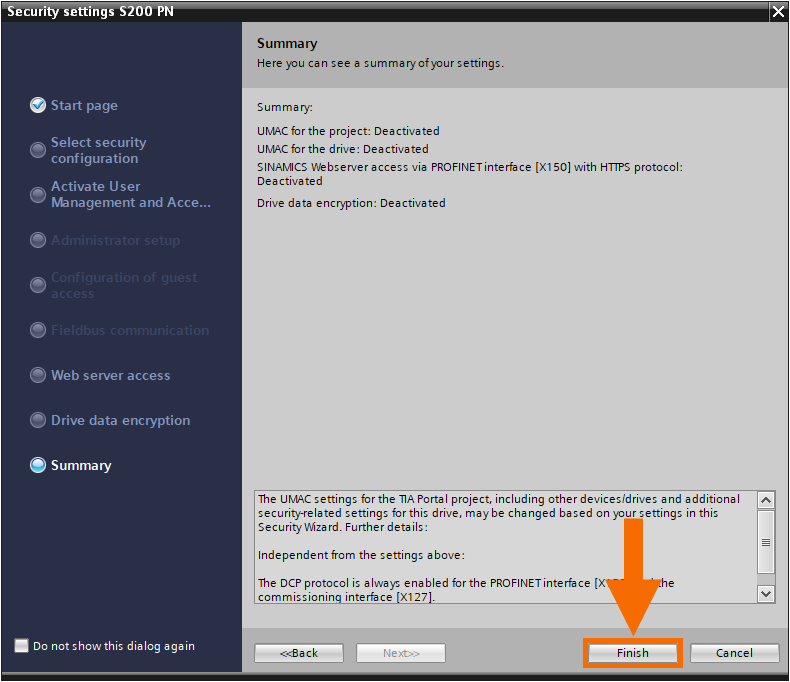
شکل ۲-۴- کنترل سرعت سروو درایو زیمنس – تکمیل تنظیمات امنیتی برای درایو
زمانی که پنجره “Device configuration” سروو درایو نمایش داده شد، به صفحه “Device view” بروید. در آنجا، درایو “S200 PN” که اخیراً اضافه شده است را پیدا کرده و انتخاب کنید. سپس بر روی گزینه “MOT” کلیک کرده، از پنجره Inspector گزینه “Properties” را انتخاب کنید و سپس آیتم “Motor-selection-1FL2” را انتخاب کنید. توان مورد نظر را با وارد کردن مقدار هدف در فیلتر “Rated power” مشخص کنید، یا میتوانید از فیلترهای دیگر برای سفارشیسازی استفاده کنید. با استفاده از نوار پیمایش، موتورهای موجود را مرور کرده تا موتور دلخواه خود را پیدا کرده و سپس آن را انتخاب کنید.
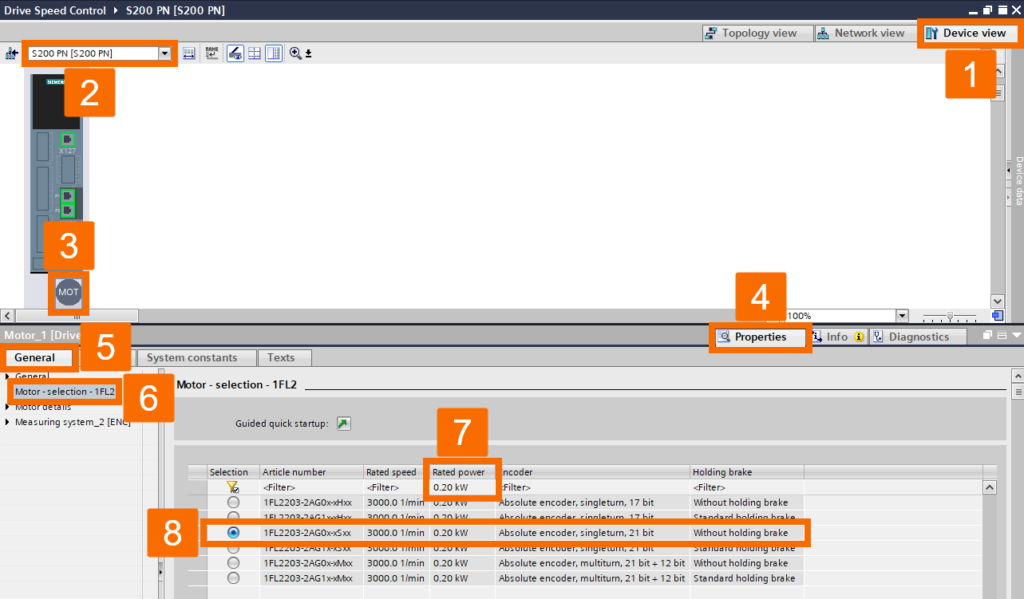
شکل ۲-۵ کنترل سرعت سروو درایو زیمنس – انتخاب موتور مورد نظر
بر روی رابط PROFINET سروو درایو کلیک کنید. سپس در تب “General” پنجرهی Inspector، به بخش “Advanced options” بروید و گزینه “Isochronous mode” را پیدا و انتخاب کنید. در نهایت، تیک گزینه “Isochronous mode” را بردارید.
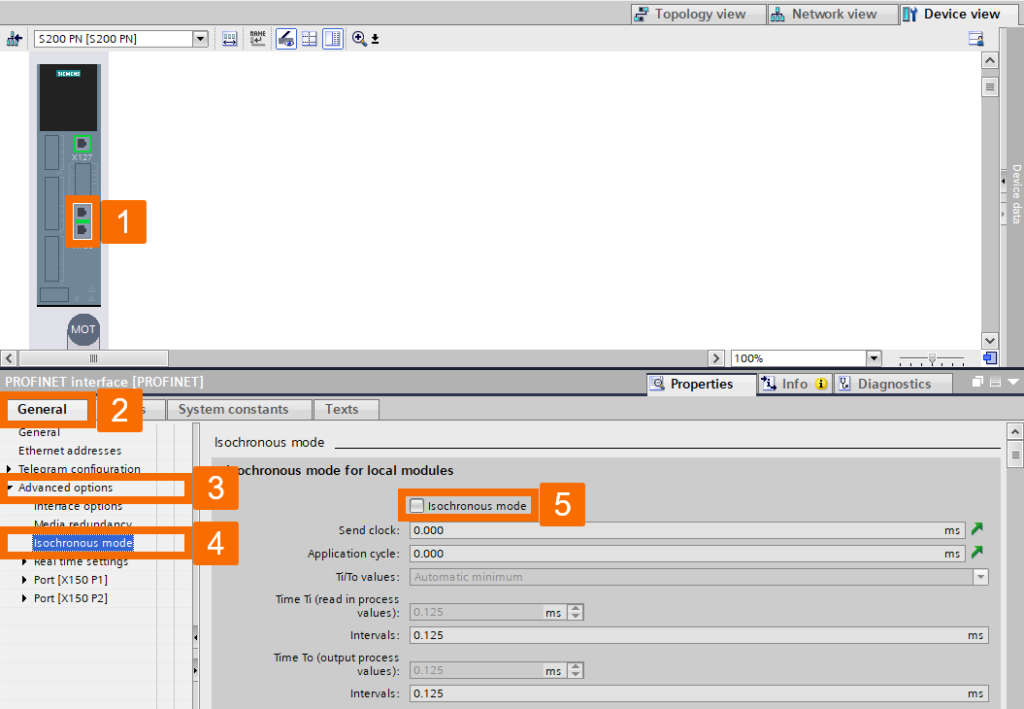
شکل ۲٫۶: کنترل سرعت سروو درایو زیمنس – غیرفعال کردن حالت Isochronous
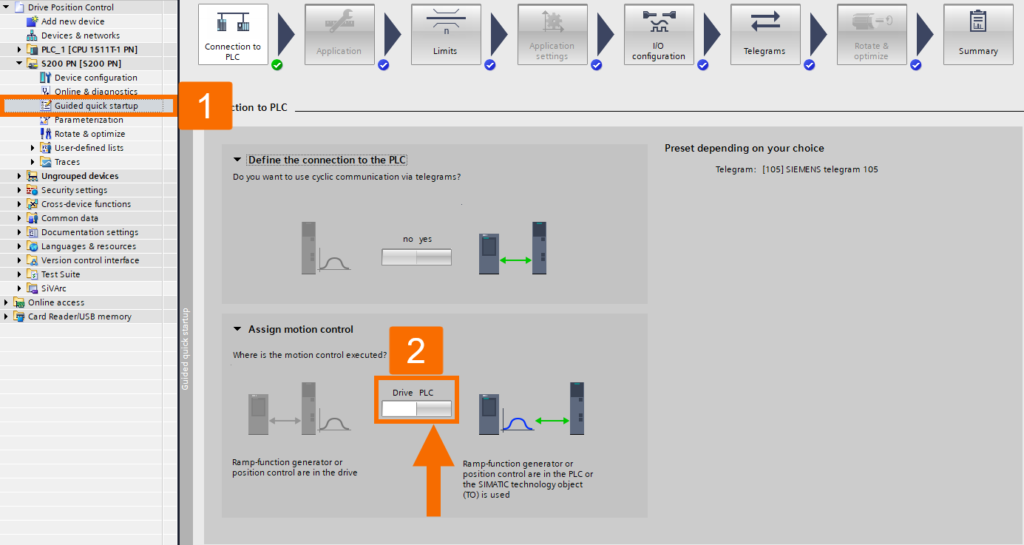
با دوبار کلیک بر روی “Guided quick startup”، ویزارد راهاندازی سریع را فعال کنید تا به یک رابط کاربری هوشمند دسترسی پیدا کنید که بهطور سیستماتیک شما را در هر مرحله از فرآیند راهاندازی سریع راهنمایی میکند. با انتقال کنترل حرکت از PLC به درایو، میتوانید عملکرد کنترل حرکت مورد نظر را فعال کنید.

شکل ۲-۷- کنترل سرعت سروو درایو زیمنس – دسترسی به راهاندازی سریع
گزینه “Speed control” را انتخاب کنید. با این کار میتوانید محدودیتها، تلگرامها و پیکربندیهای ورودی/خروجی را سفارشی کنید تا کاملاً با نیازهای خاص برنامه و پارامترهای عملیاتی هماهنگ شوند.

شکل ۲-۸-کنترل سرعت سروو درایو زیمنس – انتخاب برنامهی کنترل سرعت
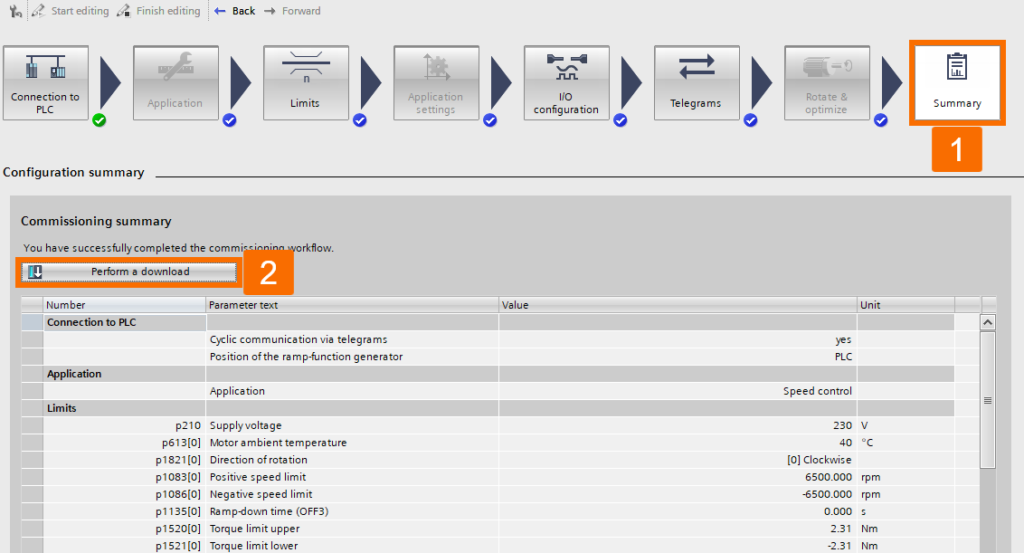
اگر میخواهید پیکربندی آفلاین را روی سروو درایو بارگذاری کنید، در تب “Summary” دکمه “Perform a download” را کلیک کنید.
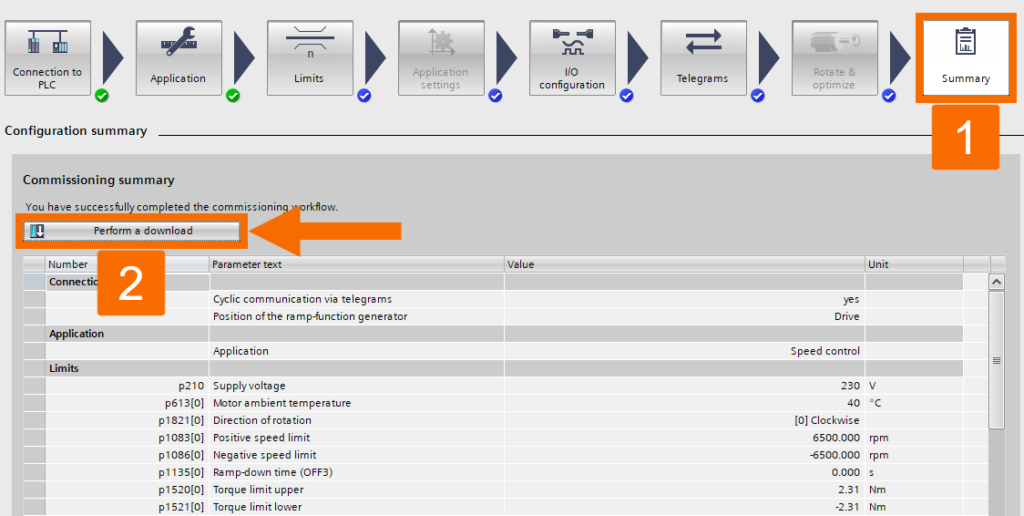
شکل ۲-۹- کنترل سرعت سروو درایو زیمنس – بارگذاری پیکربندی آفلاین روی درایو
با دوبار کلیک بر روی “Devices and networks” در درخت پروژه، پنجرهی مربوطه نمایش داده میشود. پس از آن، به “Network view” بروید و به پیکربندی اتصال بین PLC و درایو S200 PN بپردازید.
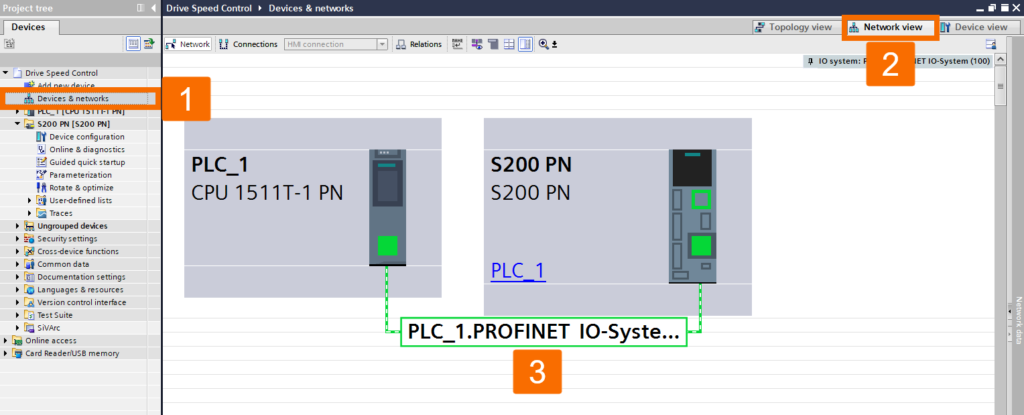
شکل ۲-۱۰-کنترل سرعت سروو درایو زیمنس – پیکربندی اتصال شبکه بین PLC و درایو
تمرکز اصلی این بخش، ارائهی یک راهنمای جامع برای برنامهنویسی PLC است تا کاربران بتوانند وظیفه را بهطور مؤثر انجام دهند.
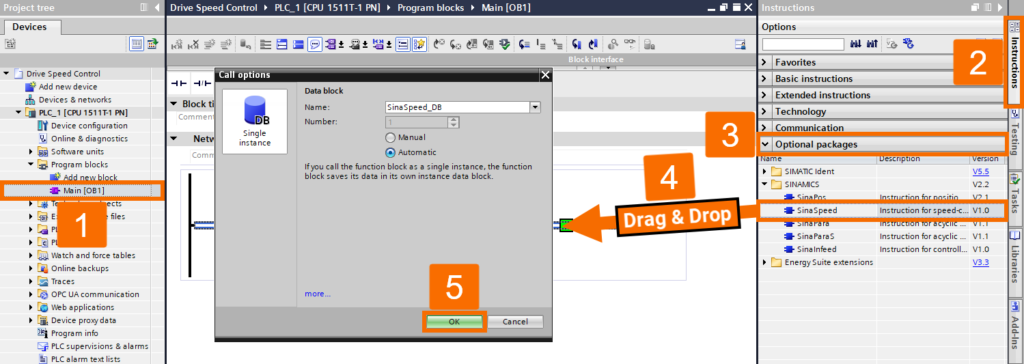
بلوک Main OB1 (organization block) را پیدا کرده و آن را باز کنید تا به محتویات آن دسترسی پیدا کنید. پس از ورود، میتوانید تابع SinaSpeed را از پوشه SINAMICS که تحت “Optional packages” در کارت وظایف “Instructions” قرار دارد، انتخاب کرده و به ناحیهی مشخص شده در OB1 منتقل کنید. زمانی که پنجره “Call options” ظاهر شد، بر روی دکمه OK کلیک کنید تا بلوک دادههای پسزمینه بهطور خودکار در پروژه وارد شود.
شکل ۳-۱- کنترل سرعت سروو درایو زیمنس – ساخت منطق PLC
بر روی “Add new block” در زیر پوشه “Program blocks” مربوط به PLC در درخت پروژه دوبار کلیک کنید، تب “Data block” را انتخاب کرده، نام دلخواه را وارد کنید، نوع بلوک داده را Global تعیین کنید و سپس دکمه OK را فشار دهید.

شکل ۳-۲- کنترل سرعت سروو درایو زیمنس – ایجاد بلوک دادهی سراسری مورد نظر
متغیرها را در بلوک دادهی سراسری ایجاد شده تعریف کنید. پس از آن، تغییرات لازم را در منطق PLC اعمال کنید تا نیازمندیهای مورد نظر برآورده شود. پس از تکمیل کامپایل پروژه، آن را به CPU PLC منتقل کرده و دانلود کنید تا برای بهرهبرداری عملیاتی آماده شود.

شکل ۳-۳- کنترل سرعت سروو درایو زیمنس – تعریف متغیرها برای بلوک دادهی سراسری و نهاییسازی منطق PLC
در این بخش، با روشهای اجرای منطق PLC آشنا خواهید شد.
با فشار دادن آیکون عینک (eyeglasses)، میتوانید به یک رابط مانیتورینگ اختصاصی دسترسی پیدا کنید که اطلاعات بلادرنگ (real-time) و اطلاعات مربوط به OB1 را ارائه میدهد. با تنظیم نقطه تنظیم سرعت (speed setpoint) به مقدار دلخواه و فعال کردن محور، درایو راهاندازی شده و چرخش موتور آغاز میشود.

شکل ۴-۱- کنترل سرعت سروو درایو زیمنس – تنظیم نقطه سرعت و فعالسازی محور
با تنظیم نقطه سرعت (speed setpoint) به یک مقدار منفی، میتوانید جهت چرخش موتور را تغییر دهید و بدین ترتیب رفتار چرخشی آن را تغییر دهید.
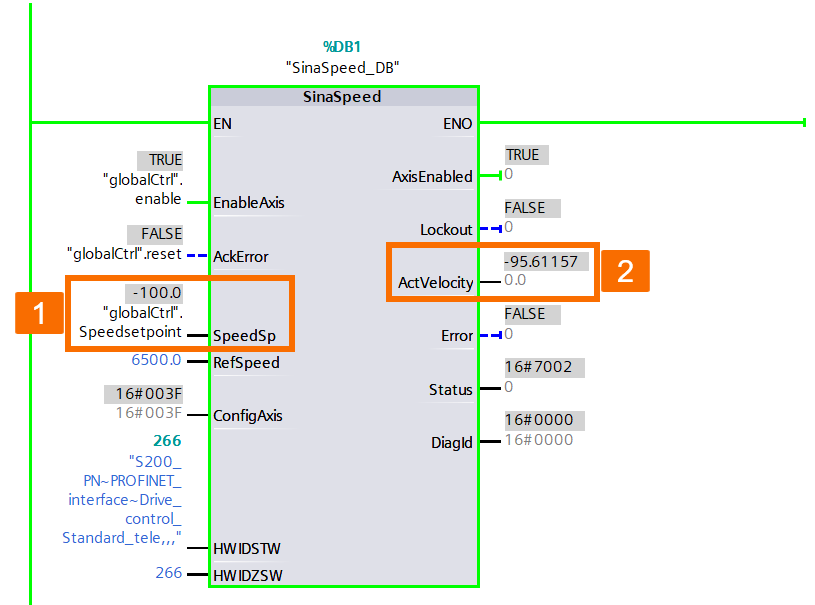
شکل ۴-۲- کنترل سرعت سروو درایو زیمنس – تغییر جهت چرخش موتور
با غیرفعال کردن محور (deactivating the axis)، چرخش موتور متوقف میشود و وضعیت “AxisEnabled” به FALSE تغییر مییابد که نشاندهندهی حالت غیرفعال آن است.
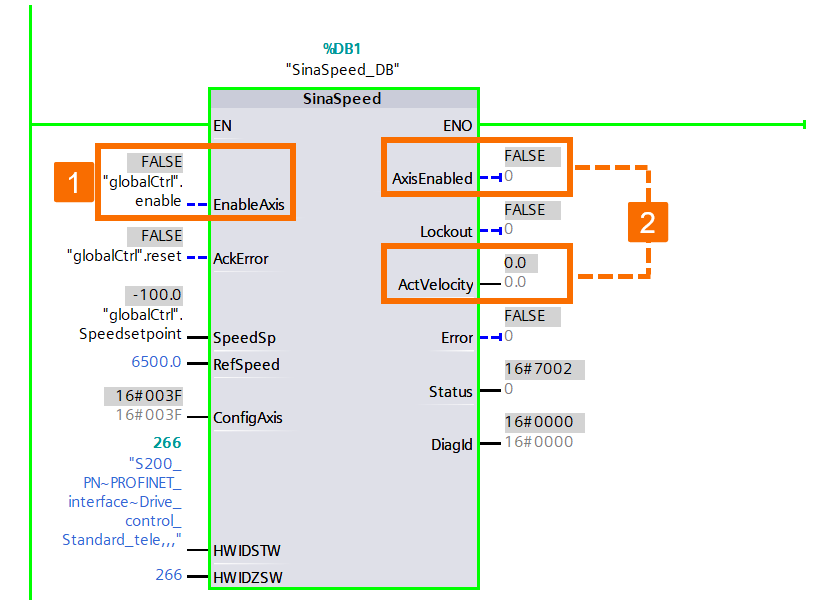
شکل ۴-۳- کنترل سرعت سروو درایو زیمنس – توقف چرخش موتور
ایجاد یک پروژه و افزودن PLC، سروو درایو و موتور مورد نظر در TIA Portal، مشابه روشی است که پیشتر در بخش کنترل سرعت سروو درایو یاد گرفتهاید.
ویزارد راهاندازی سریع (quick startup) را با دوبار کلیک بر روی ویژگی “Guided quick startup” فعال کنید. این اقدام دسترسی شما را به یک رابط کاربری فراهم میکند که شما را در انجام مراحل لازم راهنمایی میکند. یکی از این مراحل شامل انتساب عملکرد کنترل حرکت از سروو درایو به PLC مشخص شده است. علاوه بر این، میتوانید تلگرامها، پیکربندی ورودی/خروجی و محدودیتها را مطابق با نیازهای خاص برنامه خود سفارشی کنید.
شکل ۵-۱- کنترل موقعیت سروو درایو زیمنس – اختصاص کنترل حرکت به PLC
برای بارگذاری پیکربندی آفلاین روی سروو درایو، ضروری است که روی دکمه “Perform a download” در تب “Summary” کلیک چپ کنید. این مرحله برای تکمیل موفقیتآمیز فرآیند حیاتی است.
شکل ۵-۲- کنترل موقعیت سروو درایو زیمنس – بارگذاری پیکربندی آفلاین روی درایو
گزینه “Devices & networks” را در پنل سمت چپ پیدا کرده و دوبار کلیک کنید تا باز شود. پس از باز شدن، به “Network view” بروید و اتصال بین سروو درایو S200 و PLC را پیکربندی کنید تا یک اتصال قوی و مطمئن برقرار شود.
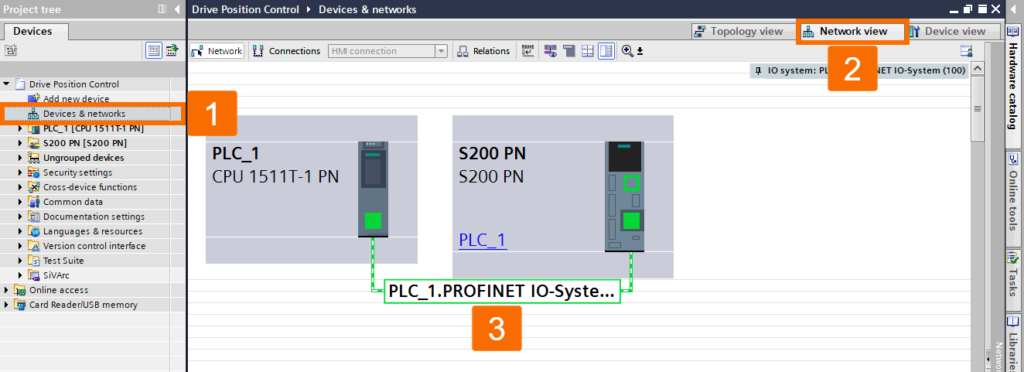
شکل ۵-۳-کنترل موقعیت سروو درایو زیمنس – پیکربندی اتصال شبکه بین PLC و درایو
به “Topology view” بروید تا روند پیکربندی اتصال توپولوژی بین سروو درایو S200 و PLC آغاز شود و ارتباط شبکهای کارآمد بین این دو مؤلفه برقرار گردد.
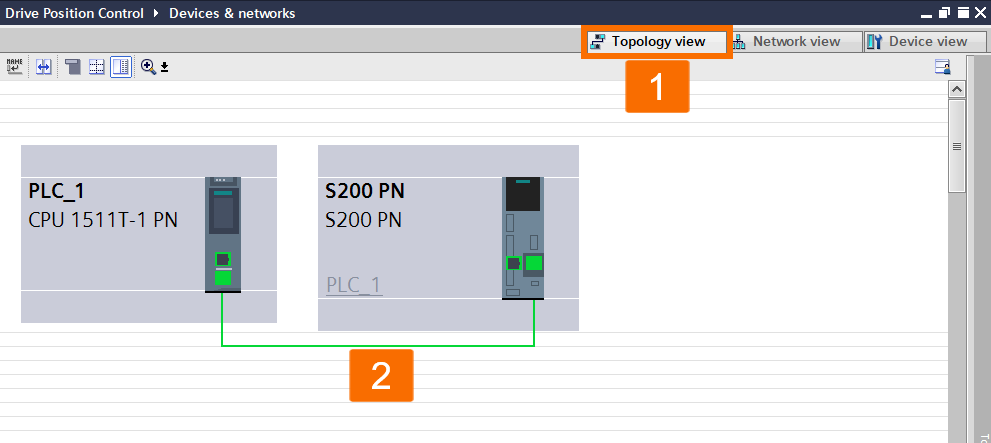
شکل ۵-۴- کنترل موقعیت سروو درایو زیمنس – پیکربندی اتصال توپولوژی بین PLC و درایو
به “Network view” بروید و رابط Profinet مرتبط با PLC را پیدا کنید. سپس در پنجره Inspector گزینه “Properties” را انتخاب کرده و به “Real-time settings” در بخش “Advanced options” در تب “General” بروید. در تنظیمات، “Synchronization role” را روی “Sync master” قرار دهید و مطمئن شوید که “Send clock” روی ۱ میلیثانیه تنظیم شده است.

شکل ۵-۵- کنترل موقعیت سروو درایو زیمنس – پیکربندی همگامسازی و ارتباط ورودی-خروجی
هدف اصلی این بخش از آموزش، آشنا کردن شما با فرآیند برنامهنویسی PLC است.
گزینه “Add new object” را در زیر پوشه “Technology objects” داخل PLC_1 در درخت پروژه پیدا کرده و دوبار کلیک کنید تا باز شود. پس از باز شدن، به دسته “Motion Control” بروید و گزینه “TO_PositioningAxis” را انتخاب کنید. سپس نام این شیء تکنولوژی (technology object) را تغییر داده و فرآیند را با کلیک روی OK تکمیل کنید.

شکل ۶-۱- کنترل موقعیت سروو درایو زیمنس – ایجاد شیء تکنولوژی برای محور موقعیتیابی
پس از باز کردن پنجره “PositioningAxis”، پارامترهای پایه را مطابق با نیازهای خاص برنامه تنظیم کنید.
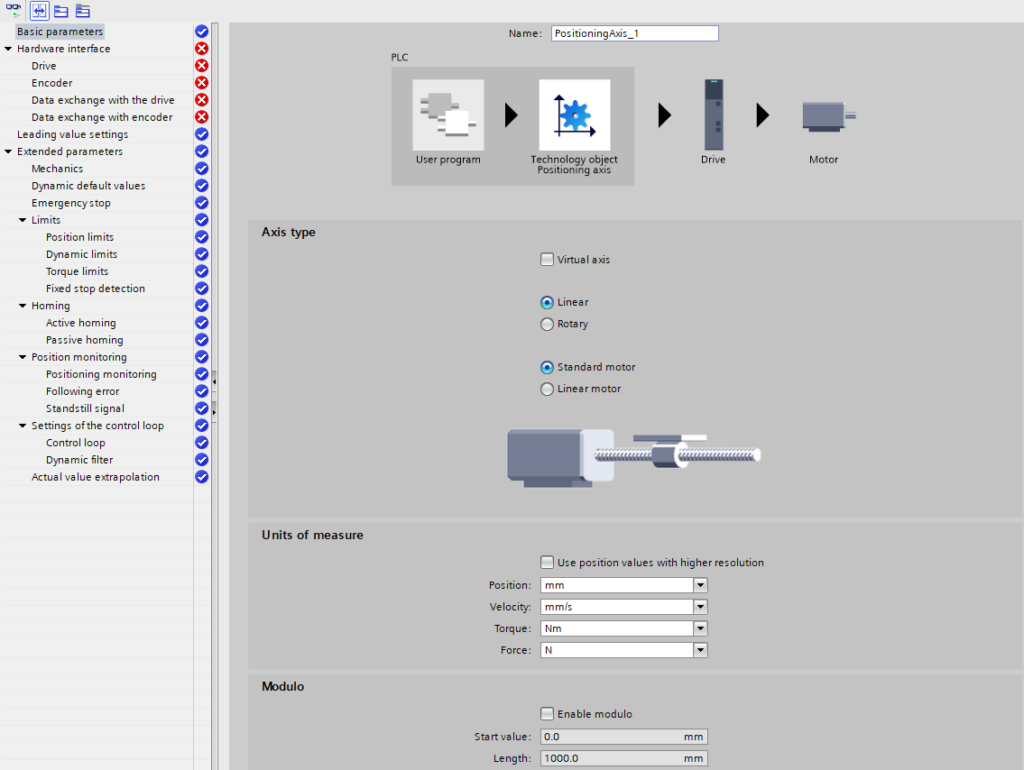
شکل ۶-۲- کنترل موقعیت سروو درایو زیمنس – پیکربندی پارامترهای پایه
گزینه “Drive” را پیدا کرده و کلیک کنید، سپس با کلیک روی دکمه ellipsis (…)، گزینههای بیشتری را مشاهده کنید. از میان گزینههای موجود، در پوشه “Profinet IO-System”، درایو مورد نظر خود را انتخاب کنید. پس از آن، دستگاه مورد نظر را انتخاب کرده و با کلیک روی علامت تیک سبز، انتخاب را تأیید کنید.
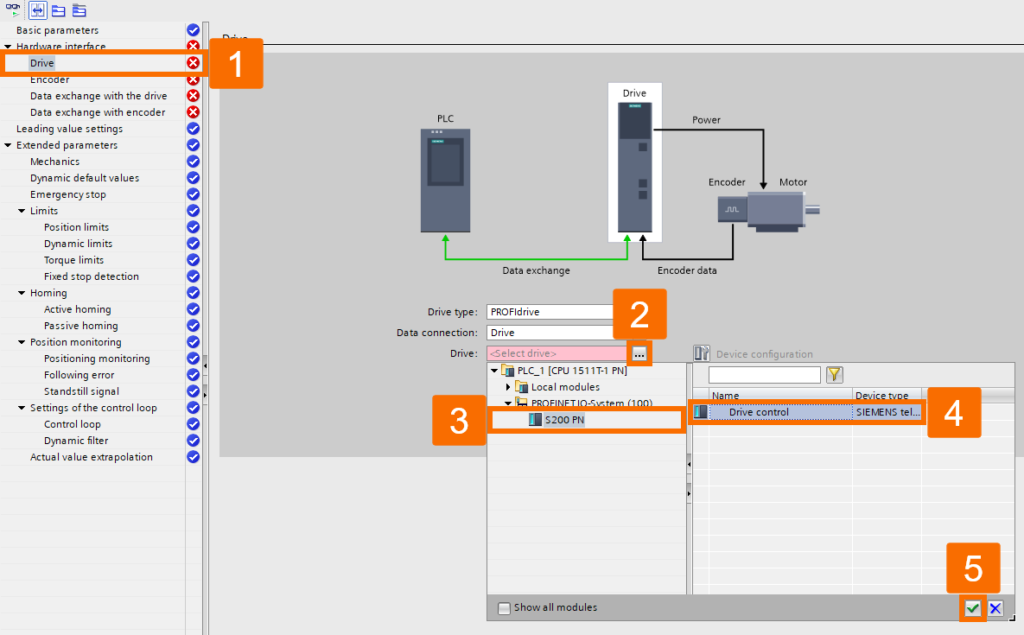
شکل ۶-۳- کنترل موقعیت سروو درایو زیمنس – انتخاب درایو مورد نظر برای اعمال شیء تکنولوژی
در بخش “Extended parameters”، پارامترهای گسترشیافته را بهگونهای تنظیم کنید که با نیازهای سناریوی فعلی برنامه بهترین تطابق را داشته باشند.

شکل ۶-۴- کنترل موقعیت سروو درایو زیمنس – پیکربندی پارامترهای گسترشیافته
گزینه “Main [OB1]” را در زیر پوشه “Program blocks” داخل PLC_1 پیدا کرده و دوبار کلیک کنید تا باز شود. منطق PLC را مطابق شکل ۶٫۵ تغییر دهید تا تغییرات لازم اعمال شود. برای این منظور، میتوانید از بلوکهای برنامهنویسی موجود در پوشه “Motion Control” تحت گزینه “Technology” در پنل “Instruction” استفاده کنید. پروژه را کامپایل کرده و سپس آن را با دانلود به PLC منتقل کنید.

شکل ۶-۵- کنترل موقعیت سروو درایو زیمنس – نهاییسازی منطق PLC
یک جدول کامل Watch and Force ایجاد کنید که امکان مانیتورینگ همزمان جدول Watch ساخته شده و بلوک سازمانی (organization block) را فراهم کند، تا بتوانید دادهها و اجرای برنامه را به طور همزمان مشاهده و مدیریت کنید.
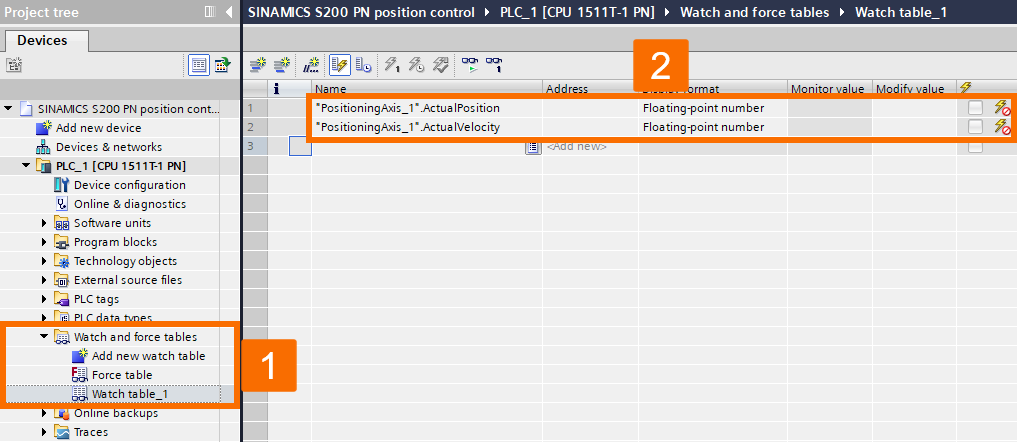
شکل ۷-۱- کنترل موقعیت سروو درایو زیمنس – ایجاد جدول Watch و Force مورد نظر
با استفاده از دستور “Enable” موجود در MC_POWER، میتوانید محور را فعال کنید، که در نتیجه وضعیت “Status” در MC_POWER به True تغییر مییابد.

شکل ۷-۲- کنترل موقعیت سروو درایو زیمنس – فعالسازی وضعیت MC_POWER
پس از فعالسازی درایو، در این برنامه مقدار موقعیت ۶.۱۴ مشاهده میشود، اما شایان ذکر است که این مقدار در سایر برنامهها میتواند متفاوت باشد.

شکل ۷-۳- کنترل موقعیت سروو درایو زیمنس – اندازهگیری موقعیت واقعی درایو
اجرای موقعیتیابی نسبی (relative positioning) را آغاز کنید و پس از اتمام موقعیت، موقعیت واقعی به دست آمده برابر با ۱۰۶.۱۴ اندازهگیری میشود.

شکل ۷-۴- کنترل موقعیت سروو درایو زیمنس – فعالسازی موقعیتیابی نسبی و اندازهگیری موقعیت واقعی درایو
اجرای فرآیند بازگشت به مبدا (homing) را آغاز کنید و پس از اتمام این فرآیند، موقعیت فعلی برابر با ۰.۰ اندازهگیری میشود.

شکل ۷-۵- کنترل موقعیت سروو درایو زیمنس – فعالسازی موقعیتیابی مطلق و اندازهگیری موقعیت واقعی درایو
اجرای موقعیتیابی مطلق (absolute positioning) را آغاز کنید و پس از اتمام وظیفه موقعیتیابی، موقعیت واقعی به دست آمده برابر با ۱۰۰.۰ اندازهگیری میشود. اجرای موقعیتیابی مطلق تنها زمانی امکانپذیر است که محور به وضعیت homed رسیده باشد.

شکل ۷-۶- کنترل موقعیت سروو درایو زیمنس – فعالسازی موقعیتیابی مطلق و اندازهگیری موقعیت واقعی درایو
در پایان، شما راه اندازی سروو درایو زیمنس Sinamics را مرور کرده و یاد گرفتید که چگونه سرعت و موقعیت سیستم سروو درایو Siemens S200 PN را با استفاده از PLC های SIMATIC S7-1500 و نرمافزار TIA Portal کنترل کنید. این ویژگیها، مهندسین اتوماسیون را با قابلیتهای ضروری کنترل دقیق موقعیت و سرعت توانمند میسازد و امکان دستیابی به کنترل حرکت برجسته و ارتقای عملیات اتوماسیون صنعتی را فراهم میکند.













