

در اتوماسیون صنعتی، دستیابی به کنترل دقیق و پایدار فرآیندهای گوناگون اغلب یک نیاز حیاتی است. یکی از چالشهای رایج، نیاز به تنظیم مؤثر است، بهویژه در سناریوهایی که حفظ یک پارامتر خاص مانند دما، فشار یا دبی جریان ضروری است. در اینجا است که کنترلکنندههای تناسبی-انتگرالی-مشتقی (PID) وارد عمل میشوند. کنترلکنندههای PID به طور گستردهای مورد استفاده قرار میگیرند تا اطمینان حاصل شود که خروجی یک سیستم به نقطه مطلوب رسیده و از طریق تنظیم مداوم ورودیهای کنترلی در آن باقی میماند،. با این حال، پیکربندی و برنامهنویسی کنترلکنندههای PID میتواند کاری پیچیده باشد که نیازمند بررسی دقیق عوامل مختلفی است. در این نوشتار به آموزش PID در Tia Portal زیمنس پرداخته می شود.
خوشبختانه، نرمافزار TIA Portal شرکت زیمنس یک راهحل جامع برای سادهسازی پیادهسازی کنترل PID در پروژههای اتوماسیون شما ارائه میدهد. در TIA Portal، یک تابع PID آماده برای استفاده وجود دارد که فرآیند برنامهنویسی PID را تسهیل میکند. این قابلیت یکپارچه PID به شما اجازه میدهد کنترلکنندههای PID را برای کاربردهای مختلف بهصورت کارآمد راهاندازی و پیکربندی کنید و در نتیجه پروژههای اتوماسیون شما دقیقتر و کارآمدتر شوند.
در این آموزش، یاد خواهید گرفت که چگونه کنترل PID را با استفاده از TIA Portal راهاندازی و برنامهنویسی کنید. ابتدا با ایجاد یک پروژه جدید و بررسی بلوکهای سازمانی مورد نیاز برای کنترل PID شروع خواهیم کرد. سپس به پیکربندی کنترلکننده PID خواهیم پرداخت و تنظیمات پایه مانند نوع کنترلکننده، پارامترهای ورودی/خروجی، تنظیمات مقدار فرآیند و تنظیمات پیشرفته را پوشش خواهیم داد. در نهایت، مراحل نهایی برنامهنویسی را توضیح خواهیم داد، از جمله ایجاد PLC Tag و ادغام آنها با دستور کنترل PID.
برای دنبال کردن این آموزش، به نصب نرمافزار TIA Portal نیاز خواهید داشت. ما ازنسخه ۱۸ استفاده خواهیم کرد، اما شما میتوانید از هر نسخه دیگری نیز استفاده کنید. هیچ سختافزار یا نرمافزار اضافی مورد نیاز نیست.
ابتدا با ایجاد یک پروژه جدید در TIA Portal با استفاده از CPU انتخابی خود از نوع ۱۲۰۰ یا ۱۵۰۰ شروع کنید. در اینجا، ما از CPU مدل ۱۵۱۱-۱ PN استفاده خواهیم کرد. پس از انجام این کار، در بخش بلوکهای برنامه در پروژه، روی “Add new block” کلیک کنید.

برنامهنویسی PID در PLCهای زیمنس TIA Portal – پروژه جدید TIA Portal
در برنامههای PID، نیاز است که تنظیمات PID به صورت مداوم و منظم اجرا شود. برای این کار، از بلوکهای سازمانی “Cycle interrupts” استفاده میکنیم. این نوع از OB به صورت دورهای و با فرکانس مشخصی اجرا شده و اجرای سایر بخشهای برنامه را متوقف میکند.
در پنجره “Add new block”، گزینه “Organization block” را انتخاب کرده، سپس “Cycle interrupt” را انتخاب کنید، یک نام برای بلوک وارد کرده و روی “OK” کلیک کنید.
بهصورت پیشفرض، زمان چرخه روی ۱۰۰,۰۰۰ میکروثانیه (اجرای هر ۱۰۰ میلی ثانیه یکبار) تنظیم شده است. ما این مقدار را حفظ خواهیم کرد، اما شما میتوانید آن را مطابق نیاز سیستم خود تغییر دهید.

برنامهنویسی PID در PLCهای زیمنس TIA Portal – ایجاد یک وقفه چرخه جدید OB
پس از ایجاد بلوک، به رابط برنامهنویسی آن وارد میشویم، جایی که دستور PID را اضافه خواهیم کرد.

برنامهنویسی PID در PLC زیمنس TIA Portal – وقفه چرخهای OB
شما میتوانید این دستورها را در بخش دستورالعملها و در قسمت “Technology” بیابید. در پوشه “PID control”، یک زیرپوشه با نام “Compact PID” وجود دارد که شامل سه نوع دستور است:

برنامهنویسی PID در PLCهای Siemens TIA Portal- دستورالعملهای فشرده PID
در این آموزش، ما از دستور PID_Compact استفاده خواهیم کرد به دلیل ماهیت عمومی آن. یک دستور “PID_Compact” را انتخاب کرده و آن را به Network1 بکشید.

برنامهنویسی PID در PLCهای TIA Portal زیمنس – افزودن دستورالعمل PID_Compact
از شما خواسته میشود تا یک DB نمونه مرتبط با دستور PID_Compact ایجاد کنید. سپس، روی “OK” کلیک کنید.

برنامهنویسی PID در PLCهای TIA Portal زیمنس – پایگاه داده نمونه PID_Compact
پس از انجام این مراحل، دستور PID_Compact در محیط کاری ظاهر خواهد شد. بهطور خلاصه، سه عنصر اصلی در رابط وجود دارد: Setpoint، Input و Output. متوجه خواهید شد که دو نوع ورودی (Input و Input_PER) و سه نوع خروجی (Output، Output_PER و Output_PWM) وجود دارد. شما فقط میتوانید از یک نوع ورودی و یک نوع خروجی استفاده کنید، نه همه بهطور همزمان. میتوانید در پیکربندی PID مشخص کنید که از کدام ورودی و خروجی استفاده شود.

برنامهنویسی PID در PLCهای TIA Portal زیمنس- دستورالعمل PID_Compact
Input و Output زمانی استفاده میشوند که با مقادیر از پیش مقیاسشده کار میکنید. Input_PER و Output_PER زمانی استفاده میشوند که میخواهید مستقیماً با دادههای آنالوگ از ورودیها و خروجیها کار کنید.
پس از راهاندازی دستور PID، اکنون میتوانیم به بخش پیکربندی برویم. بخش “Technology objects” را در درخت پروژه باز کنید. مشاهده خواهید کرد که یک بخش PID_Compact ایجاد شده است. در اینجا میتوانید به بخشهای پیکربندی و راهاندازی PID دسترسی داشته باشید.

برنامهنویسی PID در PLCهای TIA Portal زیمنس – بخش PID در اشیاء فناوری
در این آموزش، تمرکز ما فقط بر روی بخش پیکربندی خواهد بود. بخش راهاندازی (Commissioning) در آموزش تنظیم PID پوشش داده خواهد شد
در بخش PID_Compact، گزینه “Configuration” را باز کنید.
اولین بخش از تنظیمات پایه، نوع کنترلکننده است. در اینجا، میتوانید تعیین کنید که کدام کمیت فیزیکی تنظیم خواهد شد (دما، فشار، جریان… و غیره)، کدام واحد استفاده شود و حالت عملکرد PID چه باشد.

برنامهنویسی PID در PLC زیمنس TIA Portal – نوع کنترلر
در مثال ما، فرض خواهیم کرد که میخواهیم فشار (بر حسب بار) را تنظیم کنیم. لیست کمیتها را باز کرده و گزینه “Pressure” را انتخاب کنید.

برنامهنویسی PID در PLC زیمنس TIA Portal- تنظیم نوع کمیت
سپس، “bar” را بهعنوان واحد انتخاب کنید.

برنامهنویسی PID در PLCهای زیمنس TIA Portal – تنظیم واحد
در یک موقعیت واقعی فرآیندی، ما میخواهیم که PID بهصورت خودکار کار کند. برای این منظور، در بخش “Set mode to”، گزینه “Automatic mode” را انتخاب کنید.

برنامهنویسی PID در PLCهای Siemens TIA Portal – تنظیم حالت عملیاتی PID
پیکربندی نوع کنترلکننده اکنون کامل شده است.

برنامهنویسی PID در نرمافزار Siemens TIA Portal PLC – پیکربندی کامل کنترلر
حال، به بخش بعدی از تنظیمات پایه میرویم؛ یعنی پارامترهای ورودی/خروجی. در این بخش، میتوانید مشخص کنید که از کدام نوع ورودی و خروجی استفاده شود (از میان گزینههایی که قبلاً توضیح داده شد). بهصورت پیشفرض، این پارامترها روی ورودی و خروجی PER تنظیم شدهاند.
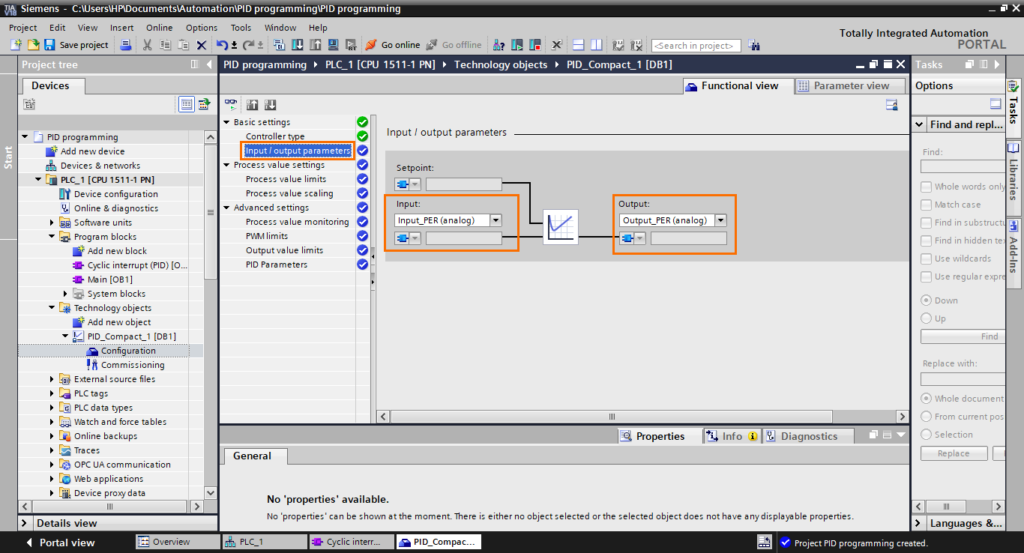
برنامه نویسی PID در PLC های زیمنس TIA Portal – پارامترهای ورودی-خروجی
ما فرض میکنیم که در سیستممان با مقادیر واقعی کار میکنیم. بنابراین لازم است پارامترها را روی “Input” و “Output” تنظیم کنیم. بخش Input را باز کرده و گزینه “Input” را انتخاب کنید.
سپس، در بخش خروجی، گزینه “Output” را انتخاب کنید.

برنامهنویسی PID در PLC زیمنس TIA Portal – پارامترهای کامل ورودی-خروجی
اکنون پارامترهای ورودی/خروجی تکمیل شدهاند.
بیایید به بخش بعدی پیکربندی برویم؛ یعنی تنظیمات مقدار فرآیند. در این بخش میتوانید محدودههای مقدار فرآیند و مقیاسبندی مقدار فرآیند را تعریف کنید.
بخش “Process value limits” را باز کنید. در اینجا، میتوانید حداکثر و حداقل مقادیر قابل دستیابی فرآیند را تعریف کنید. معمولاً محدوده اندازهگیری سنسور خود را وارد میکنید. در اینجا، ما فرض میکنیم که سنسور ما در بازهی ۰ تا ۱۲۰ بار کار میکند.

برنامهنویسی PID در PLCهای TIA Portal زیمنس – محدودیتهای مقادیر فرآیند
بخش بعدی، بخش “Process value scaling” است. در اینجا میتوانید مقیاسبندی ورودی و خروجی PER را همانند استفاده از توابع SCALE/UNSCALE با ورودیها و خروجیهای آنالوگ تعریف کنید. این بخش فقط زمانی فعال میشود که از ورودی یا خروجی PER استفاده کنید. چون ما از ورودی و خروجی معمولی استفاده میکنیم، این بخش غیرفعال است.

برنامهنویسی PID در PLCهای TIA Portal زیمنس – غیرفعال کردن مقیاسبندی مقادیر فرآیند
برای فعالسازی این بخش، بخش Input در تنظیمات ورودی/خروجی را به “Input_PER” تغییر دهید (همچنین میتوانید همین کار را برای Output نیز انجام دهید).
اگر به بخش “Process value scaling” برگردید، مشاهده خواهید کرد که این بخش فعال شده و میتوانید مقادیر بالا و پایین را ویرایش کنید (این بخش دقیقاً مشابه عملکرد توابع SCALE/UNSCALE عمل میکند).
آخرین بخش از پیکربندی PID، تنظیمات پیشرفته است. ابتدا بخش “Process value monitoring” را باز کنید. در اینجا میتوانید حدود هشدار برای مقدار فرآیند خود را جهت پایش تعریف کنید. برای مثال، حد بالا را روی ۱۰۰ بار و حد پایین را روی ۲۰ بار تنظیم میکنیم. اگر مقدار فرآیند از حد بالا فراتر رود، هشدار حد بالا فعال خواهد شد. اگر مقدار فرآیند از حد پایین کمتر شود، هشدار حد پایین فعال میشود.

برنامهنویسی PID در PLCهای TIA Portal زیمنس – هشدارهای مربوط به مقادیر فرآیند
بخش بعدی، “PWM limits” است. در اینجا میتوانید کمینه و بیشنه زمان روشن/خاموش بودن پهنای پالس مدوله شده را تعریف کنید.

برنامهنویسی PID در PLCهای زیمنس TIA Portal – محدودیتهای PWM
سپس به بخش “Output value limits” میرسیم. در اینجا میتوانید حداکثر و حداقل مقادیر خروجی را مشخص کنید. این مقادیر بهصورت درصدی از مقدار فرآیند مقیاس شدهاند.

برنامهنویسی PID در PLCهای TIA Portal زیمنس – بازه مقادیر خروجی
آخرین بخش از تنظیمات پیشرفته، پارامترهای PID است. در اینجا میتوانید پارامترهای تناسبی (P)، انتگرالی (I) و مشتقی (D) کنترلکننده PID خود را تعریف کنید. بهصورت پیشفرض، این بخش اجازهی ویرایش دستی را نمیدهد.
برای فعالسازی ویرایش دستی، گزینه “Enable manual entry” را تیک بزنید. این کار به شما اجازه میدهد تا پارامترهای P، I و D را طبق مشخصات خود ویرایش کنید.
اکنون که پیکربندی کنترلکننده PID را کامل کردهایم، میتوانیم به مرحله نهایی برنامهنویسی برویم. برای این کار، تگهای PLC را ایجاد کرده و آنها را در دستور PID_Compact که قبلاً ایجاد کردهایم، وارد میکنیم.
ابتدا جدول تگ پیشفرض را باز کرده و تگهای زیر را ایجاد کنید. از آنجا که ما از ورودی و خروجی معمولی (با مقادیر حقیقی) استفاده میکنیم، حتماً نوع داده را به صورت Real تعریف کنید.

برنامهنویسی PID در PLCهای زیمنس TIA Portal – تگ های PLC
پس از اتمام، آنها را مطابق شکل زیر به دستور PID_Compact اضافه کنید.

برنامهنویسی PID در PLCهای TIA Portal زیمنس – آموزش کامل PID_Compact
ما کنترلکننده PID را با رابطهای ورودی و خروجی پیکربندی کردهایم. این مقادیر مستقل از مقیاسبندی داخلی دستورالعمل، از پیش مقیاس شدهاند. کنترلکننده PID مقدار فرآیند را از رابط Input خوانده و خروجی را مطابق با مقدار Setpoint اصلاح میکند.
در این آموزش، شما آموختید که چگونه کنترل PID را در نرمافزار TIA Portal زیمنس راهاندازی و برنامهنویسی کنید و بدین ترتیب یکی از جنبههای پیچیده و حیاتی اتوماسیون صنعتی را سادهتر سازید. ما با ایجاد یک پروژه جدید شروع کردیم، بلوکهای وقفه دورهای را معرفی کردیم و بلوکهای تابع PID موجود در TIA Portal را بررسی نمودیم. سپس به فرآیند پیکربندی پرداختیم و نوع کنترلکننده، پارامترهای ورودی/خروجی، تنظیمات مقدار فرآیند و تنظیمات پیشرفته را پوشش دادیم. در نهایت، با یکپارچهسازی تگهای PLC در دستور کنترل PID، آموزش را به پایان رساندیم. از طریق این مراحل، شما دانش و مهارت لازم برای پیادهسازی مؤثر کنترل PID در محیط TIA Portal را به دست آوردید.
ادغام PID Compact در TIA Portal بهطرز قابل توجهی ساده و کارآمد است. با رابط کاربری آسان و بلوکهای تابع آماده، TIA Portal فرآیند راهاندازی کنترلکنندههای PID را در پروژههای صنعتی تسهیل میکند. این ادغام، کل فرآیند از پیکربندی اولیه تا مانیتورینگ زمان واقعی را ساده کرده و مهندسان و اپراتورها را قادر میسازد تا کنترل دقیق و عملکرد بهینه را در کاربردهای صنعتی خود بهدست آورند. همانطور که صنایع بهطور فزایندهای خواستار توانمندیهای پیشرفتهتر در زمینه اتوماسیون و کنترل هستند، TIA Portal بهعنوان ابزاری ارزشمند در سادهسازی وظایف پیچیدهای مانند کنترل PID ظاهر میشود که در نهایت موجب افزایش بهرهوری و کارایی در محیطهای صنعتی میشود.













