انواع انکودر (Encoder) و سازوکار آنها
تاریخ انتشار : 2024/07/13
انکودرها دستگاههای حسگری هستند که یک فیدبک درباره موقعیت یا حرکت اشیاء به سیستمهای کنترلی ارائه میدهند. این فیدبک به سیستم کنترلی اجازه میدهد تا تشخیص دهد آیا شیء مورد نظر در حال حرکت است یا بهدرستی در جای خود قرار دارد و بر اساس حرکت و موقعیت شیء، تنظیمات لازم را اعمال کرده یا اقدامات خاصی انجام دهد. انکودرها معمولاً برای اندازهگیری یک یا چند پارامتر خاص از یک شیء مورد استفاده قرار میگیرند؛ از جمله سرعت، موقعیت، و جهت حرکت آن، یا برای ارائه شمارشی مرتبط با حرکت شیء. یک مثال عملی از کاربرد انکودر، استفاده از آن در فرایند «برش به طول مشخص» است. تصور کنید عملیاتی که در آن یک دستگاه برای تولید مواد با طول ثابت طراحی شده است. ماده خام، مانند پارچه، بهطور پیوسته از یک قرقره وارد دستگاه میشود. دستگاه باید تشخیص دهد چه زمانی طول مورد نظر از ماده خام از قرقره وارد نوار نقاله آن شده است تا بتواند در لحظهای دقیق، تیغه برش را از روی ماده عبور دهد و طول صحیحی از آن را برش بزند. در این کاربرد، یک انکودر سیستم کنترلی دستگاه را مطلع میسازد که چه زمانی عملیات برش انجام شود و بدین ترتیب دقت و یکنواختی حفظ میگردد. این مقاله به بررسی انواع مختلف انواع انکودر (Encoder) و سازوکار آنها، ارائه درکی پایهای از نحوه عملکرد آنها، و بیان نکات کلیدی و مشخصات مهم در انتخاب انکودر مناسب برای کاربردهای خاص میپردازد.
یک انکودر چرخش اجسام را به عنوان یک مقدار تغییر فیزیکی توسط عنصر حسگر تشخیص میدهد و در نهایت اطلاعات چرخش/زاویه را به صورت یک سیگنال الکتریکی به بیرون منتقل میکند. یک انکودر به چهار نوع طبقهبندی میشود:
مکانیکی، نوری، مغناطیسی و القایی الکترومغناطیسی. چهار نوع اطلاعات برای چرخش موتور با دقت بالا لازم است: مقدار چرخش، سرعت چرخش، جهت چرخش و موقعیت چرخش.
مکانیزم تشخیص چرخش و زاویه چیست؟
در بخش اول، اشاره کردیم که انکودر حسگری است که زاویه چرخش، جابجایی خطی و سرعت را تشخیص میدهد. حسگر یک عنصر یا قطعه الکترونیکی است که تغییرات پدیدههای طبیعی را تشخیص میدهد. به عنوان مثال، یک حسگر نوری روشن/خاموش شدن نور را تشخیص میدهد و یک حسگر مغناطیسی توزیع میدان مغناطیسی را تشخیص میدهد.
سنسور نقشهای زیر را دارد. با خروجی تغییر کمیت فیزیکی تشخیص داده شده به عنوان یک سیگنال الکتریکی، میتوان اطلاعات را به خارج منتقل کرد. همانطور که در شکل نشان داده شده است، انکودر سیگنال الکتریکی خروجی از عنصر حسگر را پردازش میکند و در نهایت اطلاعات چرخش/زاویه را به عنوان یک سیگنال الکتریکی دیجیتال یا آنالوگ به خارج ارسال میکند.
هنگام چرخش، کدام کمیت فیزیکی تغییر میکند؟
تفاوت در کمیت فیزیکیای که باید اندازهگیری شود، به معنای تفاوت در روش تشخیص حسگر است. بنابراین، این موضوع یک عامل اساسی است که مزایا و معایب انکودرها را تعیین میکند. انکودرها بر اساس روش تشخیص، به چهار نوع زیر تقسیم میشوند.
انکودر برپایه روش مکانیکی (نوع تماسی)
در این روش، موقعیت چرخشی با استفاده از یک مقاومت متغیر (پتانسیومتر) تشخیص داده میشود که مقاومت الکتریکی آن متناسب با زاویهی چرخش تغییر میکند. این نوع انکودر مکانیکی معمولاً پتانسیومتر (Potentiometer) نامیده میشود. وقتی که اسلایدر (لغزنده) روی مقاومتها حرکت میکند، مقدار مقاومت پتانسیومتر متناسب با فاصلهی حرکت اسلایدر تغییر میکند.
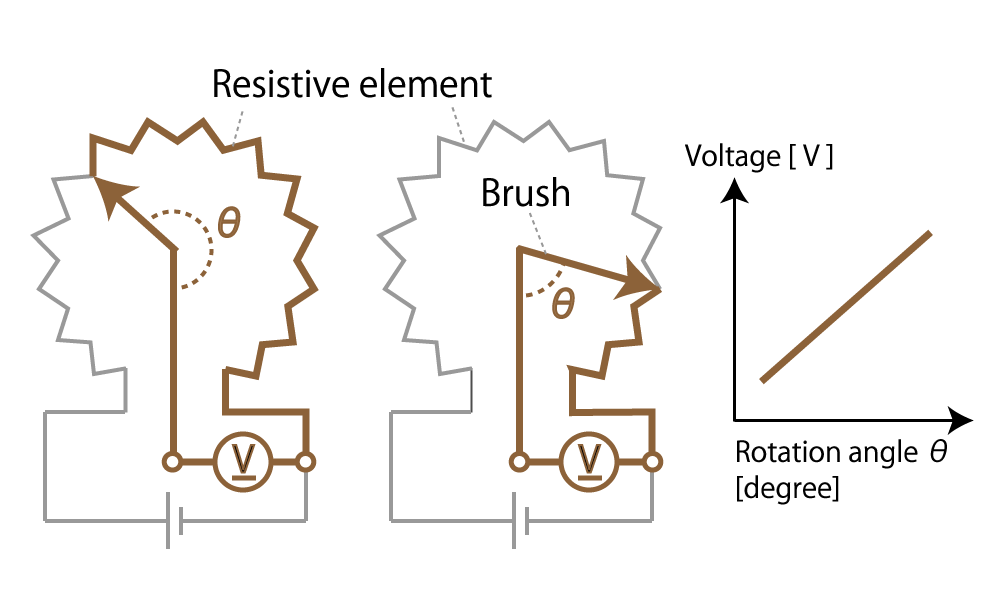
انکودر نوع مکانیکی (نوع تماسی)
انکودر برپایه روش نوری
این روشی است که با استفاده از یک حسگر نوری تشخیص میدهد که آیا نور از شکافهای شعاعی یک دیسک چرخان (که به آن چرخ کد یا code wheel گفته میشود و به محور موتور متصل است) عبور میکند یا نه. وقتی نور از شکافها عبور میکند، سیگنال پالس نوری تغییر میکند. با شمردن تعداد این پالسها، میتوان مقدار چرخش محور موتور را تشخیص داد.
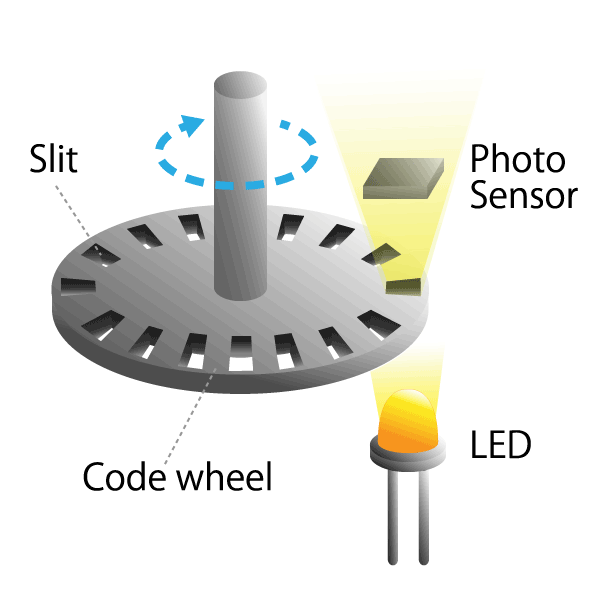
انکودر نوع نوری
انکودر برپایه روش مغناطیسی
این روش از یک حسگر مغناطیسی برای اندازهگیری تغییرات در توزیع میدان مغناطیسی ایجاد شده توسط یک آهنربای دائمی متصل به شفت موتور استفاده میکند. هنگامی که موتور میچرخد، توزیع میدان مغناطیسی آهنربای دائمی نیز تغییر میکند، بنابراین اگر آن را با یک حسگر مغناطیسی تشخیص دهید، میتوانید موقعیت چرخشی شفت موتور را تعیین کنید. ما در بخش ۵ اصول عملکرد و ویژگیها را توضیح خواهیم داد.
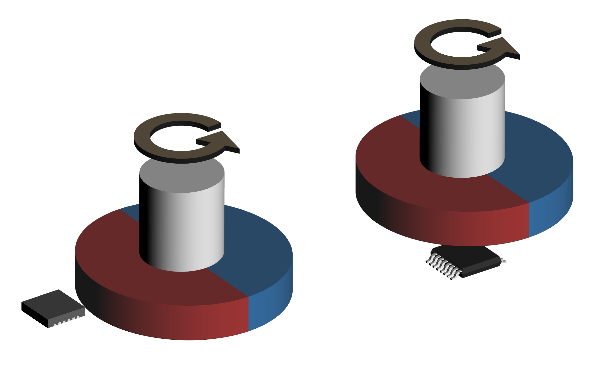
انکودر نوع مغناطیسی
انکودر برپایه روش القای الکترومغناطیسی
در این روش، تغییرات میدان مغناطیسی که بین سیمپیچ القایی (سیمپیچ تحریک) و سیمپیچ ثابت (سیمپیچ آشکارساز) متصل به محور موتور ایجاد میشود، خوانده میشود. اصل پایهای این روش مشابه ترانسفورماتور است و از القای الکترومغناطیسی استفاده میکند. چنین انکودری را ریزولور (Resolver) مینامند.
تأمین برق برای سیمپیچ القایی چرخان در ریزولور، بهدلیل استفاده از روش تماسی (مانند برس یا زغال)، ممکن است باعث فرسایش شود. با این حال، نوعی ریزولور به نام ریزولور با راکتانس متغیر (VR – Variable Reactance) وجود دارد که این مشکل را کاهش میدهد.

انکودر نوع القای الکترومغناطیسی
دسته بندی انواع انکودر
روشهای مختلفی برای دستهبندی انکودرها در کاربردهای کنترل حرکت وجود دارد. رایجترین روش این است که این دستگاهها را بر اساس نوع حرکتی که اندازهگیری میکنند، یعنی خطی (حرکت در یک خط مستقیم) یا چرخشی، دستهبندی کنیم. سه نوع رایج انکودر عبارتاند از: انکودر خطی، انکودر چرخشی، و انکودر زاویهای.
انکودرهای خطی
انکودرهای خطی حرکت اشیاء را در امتداد یک مسیر یا خط اندازهگیری میکنند، مانند کاربرد برش به طول مشخص که پیشتر به آن اشاره شد. این نوع انکودر از یک مبدل (ترنسدیوسر) برای اندازهگیری حرکت یا فاصله بین دو نقطه استفاده میکند. بسته به نوع کاربرد، ممکن است از یک کابل (برای فواصل بلندتر) یا یک میله کوتاه (برای فواصل کوتاهتر) استفاده شود. در این سیستمها، یک کابل بین مبدل انکودر و جسم متحرک کشیده میشود. با حرکت جسم، مبدل دادههایی را از کابل جمعآوری کرده و یک سیگنال خروجی آنالوگ یا دیجیتال تولید میکند که نشاندهنده حرکت یا موقعیت جسم است.
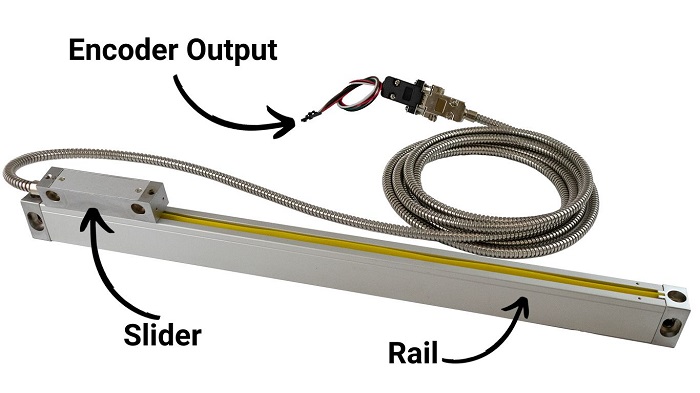
انکودر خطی
انکودرهای چرخشی
انکودرهای چرخشی بازخوردی دربارهی حرکت یک جسم یا دستگاه چرخان، مانند شافت موتور، ارائه میدهند. این انکودر موقعیت زاویهای شافت در حال حرکت را به یک سیگنال خروجی آنالوگ یا دیجیتال تبدیل میکند که به سیستم کنترلی امکان میدهد موقعیت یا سرعت شافت را تعیین کند.
انکودرهای چرخشی ممکن است دارای شافت داخلی باشند یا از نوع طراحیشدهای به نام انکودرهای “thru-bore” (سوراخدار) باشند، به این معنا که میتوان آنها را مستقیماً روی شافت چرخان، مانند شافت موتور، نصب کرد. انکودرهای thru-bore در اندازههای مختلفی در دسترس هستند و دارای گزینههای نصب با بست یا پیچ تنظیم میباشند که آنها را برای استفاده در طراحی ماشینآلات مناسب میسازد. از فلنجها برای جایگذاری انکودر و جلوگیری از چرخش آن همراه با شافت متحرک استفاده میشود.

انکودرهای چرخشی
انکودرهای زاویهای
انکودرهای زاویهای از نظر عملکرد شبیه انکودرهای چرخشی هستند زیرا حرکت چرخشی را پایش و بازخورد آن را ارائه میدهند. با این حال، انکودرهای زاویهای با دقت بالاتر خود متمایز میشوند، که آنها را برای کاربردهایی که اندازهگیری دقیق زاویه حیاتی است، ایدهآل میسازد.

انکودرهای زاویه ای
انکودرهای مطلق (Absolute) و افزایشی (Incremental)
هم انکودرهای خطی و هم انکودرهای چرخشی میتوانند از نوع مطلق (Absolute) یا افزایشی (Incremental) باشند. این تقسیمبندی، نوع سیگنال خروجی تولیدشده توسط انکودر را توصیف میکند. در انکودر مطلق، سیگنال خروجی تولیدشده توسط دستگاه، مجموعهای منحصربهفرد از بیتهای دیجیتال است که با یک موقعیت خاص از شیء مورد اندازهگیری مطابقت دارد. حتی در صورت قطع برق، انکودر مطلق همچنان میتواند موقعیت شیء را تعیین کند، چرا که برای هر موقعیت، یک سیگنال دیجیتال مشخص و منحصربهفرد وجود دارد.
انکودرهای مطلق چرخشی در دو نوع طراحی تکدور (Single-turn) و چنددور (Multi-turn) عرضه میشوند. انکودرهای تکدور قادرند اطلاعات مربوط به موقعیت را در یک چرخش کامل شافت ارائه دهند. انکودرهای چنددور قادر به ارائه اطلاعات موقعیت در چندین چرخش شافت هستند، حتی در صورت تعداد بالای چرخشها.
انکودرهای مطلق در کاربردهایی استفاده میشوند که دانستن موقعیت دقیق یک شیء اهمیت بالایی دارد. همچنین در شرایطی به کار میروند که دستگاه یا فرایند برای مدت طولانی غیرفعال است یا با سرعت بسیار کم حرکت میکند.

انکودرهای مطلق (Absolute) و افزایشی (Incremental)
در مقابل، انکودرهای افزایشی از روشی سادهتر برای شمارش حرکت استفاده میکنند؛ آنها با حرکت شیء، پالسهایی تولید میکنند و موقعیت از طریق شمارش این پالسها مشخص میشود. از آنجا که این نوع انکودرها بر پایهی شمارش پالس عمل میکنند، هیچ سیگنال دیجیتال منحصربهفردی برای تعیین موقعیت مطلق وجود ندارد. بنابراین، در صورت قطع برق، انکودر افزایشی باید به یک موقعیت مرجع (Home Position یا نقطهی مرجع) ارجاع داده شود تا شمارنده بازنشانی شده و مجدداً برای محاسبهی حرکت نسبی مورد استفاده قرار گیرد.
بهطور ساده، میتوان تفاوت میان این دو را اینگونه بیان کرد: انکودرهای افزایشی حرکت نسبی را نسبت به یک نقطهی مرجع اندازهگیری میکنند، در حالی که انکودرهای مطلق موقعیت را بهصورت مستقیم و با استفاده از یک کد سیگنال منحصربهفرد که موقعیت را بازتاب میدهد، اندازهگیری مینمایند.
چه نوع اطلاعات چرخش و زاویهای در دسترس است؟
وضعیت چرخش چیست؟
برای نمونه، یک موتور را در نظر بگیرید که متوقف شده، در جهت عقربههای ساعت میچرخد، در خلاف جهت عقربههای ساعت میچرخد، با سرعت ثابت میچرخد، شتاب میگیرد، سرعتش کم میشود و غیره.
برای درک دقیق این شرایط و چرخاندن دقیق موتور، چهار نوع اطلاعات مورد نیاز است.
مقدار چرخش
این بخش اطلاعاتی دربارهی این است که محور موتور چند بار و تا چه زاویهای چرخیده است. برای مثال، در موتور DC بدون جاروبک (Brushless DC Motor)، میتوان مقدار چرخش روتور را با تشخیص تغییر در قطبهای مغناطیسی روتور به دست آورد، و از این طریق موتور را بهصورت مؤثر و بهینه چرخاند.
سرعت چرخش
این اطلاعاتی در مورد سرعت چرخش شفت موتور است. همانطور که در قسمت اول اشاره کردم، سروو موتور سرعت چرخش یک موتور DC بدون جاروبک یا موتور AC را تشخیص میدهد و کنترل بازخورد را انجام میدهد تا شفت موتور با سرعتی که توسط تقویتکننده سروو تنظیم شده است، بچرخد.
جهت چرخش
این اطلاعات نشان میدهد که محور موتور در کدام جهت چرخیده است — ساعتگرد یا پادساعتگرد. در سیستمهایی که مقدار چرخش محور موتور را از طریق تعداد پالسهای خروجی انکودر تشخیص میدهند، اگر جهت چرخش به درستی شناسایی نشود، مقدار چرخش بهاشتباه شمارش میشود.
موقعیت چرخشی
این اطلاعات نشان میدهد که زاویهی چرخش محور موتور چند درجه است. همانطور که در قسمت اول ذکر کردیم، موتورهای سروو و موتورهای سروو استپر از انکودرها برای تشخیص زاویه چرخش استفاده میکنند و از طریق کنترل فیدبک، بررسی میکنند که آیا زاویه چرخش هدف به دست آمده یا نه. در نتیجه، کنترل موقعیت با دقت بسیار بالا انجام میشود.
چکیده سازوکار انکودر
یک انکودر چرخش اجسام را بهعنوان یک مقدار تغییر فیزیکی توسط عنصر حسگر تشخیص میدهد و در نهایت اطلاعات چرخش/زاویه را بهعنوان سیگنال الکتریکی به خارج منتقل میکند. انکودرها به چهار نوع تقسیم میشوند: مکانیکی، نوری، مغناطیسی و القاء الکترومغناطیسی. برای چرخاندن موتور با دقت بالا، چهار نوع اطلاعات ضروری وجود دارد: مقدار چرخش، سرعت چرخش، جهت چرخش و موقعیت چرخشی.
در این قسمت، توضیح داده شد که چهار نوع انکودر با اصول عملکرد مختلف بسته به کمیت فیزیکیای که باید تشخیص داده شود وجود دارد. همچنین توضیح دادیم که برای چرخاندن موتور با دقت بالا، چهار نوع اطلاعات چرخش ضروری است. امیدوارم که با نوع انکودرها و سازوکار آنها آشنا شده باشید.