استراتژی کنترل Override شامل انتخاب بین دو یا چند سیگنال خروجیِ کنترلکننده یک فرآینداست، بهطوریکه در هر لحظه فقط یک کنترلکننده اجازه اعمال کنترل بر فرایند را دارد. تمام کنترلکنندههای دیگری که «انتخاب نشدهاند»، در نتیجه توسط کنترلکننده منتخب Override میشوند. کنترل Override یک استراتژی کنترلی است که در فرایندهای صنعتی بهمنظور تضمین ایمنی سیستم و بهرهوری عملیاتی به کار میرود. این روش با انتخاب خودکار بحرانیترین متغیر قابل کنترل از میان چند متغیر رقیب عمل میکند. Override control زمانی وارد عمل میشود که چندین متغیر فرایندی باید کنترل شوند، اما به دلیل محدودیتهای ایمنی یا فرایندی، در هر لحظه فقط یکی از آنها میتواند در اولویت قرار گیرد. Override control تضمین میکند که سیستم حتی در شرایط اغتشاش یا وضعیتهای غیرعادی، در محدودههای ایمن و بهینه عمل کند.
در Override control از چندین کنترلکننده استفاده میشود که هر یک مسئول کنترل یک متغیر فرایندی مشخص هستند. با این حال، بهجای آنکه این کنترلکنندهها بهصورت مستقل عمل کنند، یک Override controller (یا Selector) تعیین میکند که در هر لحظه کدام متغیر از اهمیت بالاتری برخوردار است و با Override کردن سایر کنترلکنندهها، کنترل المان نهایی (مانند شیر یا عملگر) را در اختیار میگیرد. به این ترتیب، بحرانیترین متغیر در محدوده مطلوب خود نگه داشته میشود و از ایجاد شرایط ناایمن یا آسیب به تجهیزات جلوگیری میگردد.
روش کنترل فرآیند Override
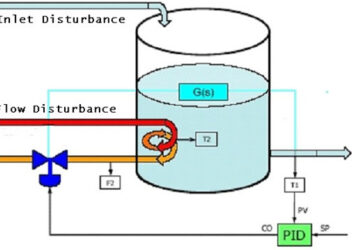
در بسیاری از فرایندهای صنعتی، نگه داشتن برخی متغیرها در محدودههای مشخص برای ایمنی حیاتی است. برای مثال، در یک راکتور شیمیایی، هم دما و هم فشار باید کنترل شوند تا از بروز شرایط خطرناک جلوگیری شود. Override control میتواند بسته به میزان اهمیت ایمنی، یکی از این متغیرها را در اولویت قرار دهد.
Override control با اطمینان از اینکه بحرانیترین متغیر فرایندی همواره تحت کنترل است، به بهینهسازی عملکرد فرایند کمک میکند. این موضوع منجر به بهرهبرداری کاراتر و استفاده بهتر از منابع میشود.
فرایندهای صنعتی معمولاً در معرض اغتشاشاتی قرار دارند که چندین متغیر را تحت تأثیر قرار میدهد. Override control به سیستم اجازه میدهد بهصورت پویا تشخیص دهد کدام متغیر باید کنترل شود و در نتیجه، پاسخی مقاوم و پایدار به اغتشاشات ارائه دهد.
با اولویت دادن به کنترل متغیرهای بحرانی، Override control میتواند از آسیب دیدن تجهیزات جلوگیری کند. بهعنوان مثال، در یک سیستم بویلر، کنترل فشار برای جلوگیری از افزایش بیشازحد آن، از بویلر در برابر آسیب محافظت میکند.
در راکتورهای شیمیایی، Override control برای حفظ متغیرهای بحرانی مانند دما و فشار استفاده میشود. اگر دما به سطوح ناایمن نزدیک شود، Override controller میتواند کنترل دما را نسبت به سایر متغیرها در اولویت قرار دهد تا از واکنش فرار (Runaway Reaction) جلوگیری شود.
در عملیات حفاری، کنترل پارامترهایی مانند فشار حفاری و نرخ جریان اهمیت زیادی دارد. Override control تضمین میکند که بحرانیترین پارامتر، که میتواند بر ایمنی یا بهرهوری اثر بگذارد، همواره کنترل شود.
در سیستمهای کنترل بویلر، Override control برای مدیریت فشار بخار و سطح آب استفاده میشود. با اولویت دادن به متغیر بحرانیتر، عملکرد ایمن و کارای بویلر تضمین میگردد.
در سیستمهای گرمایش، تهویه و تهویه مطبوع، Override control میتواند برای اولویت دادن به کنترل دما در نواحی بحرانی استفاده شود و آسایش و ایمنی این مناطق را تضمین کند.
در فرایندهایی مانند شکلدهی فلزات یا اکستروژن پلاستیک، Override control برای مدیریت پارامترهای بحرانی نظیر فشار و دما به کار میرود تا کیفیت محصول و حفاظت از تجهیزات تضمین شود.
در تأسیسات تصفیه آب، Override control میتواند برای حفظ پارامترهای بحرانی مانند pH و سطح کلر استفاده شود و کیفیت و ایمنی آب را تضمین نماید.
با اطمینان از کنترل همیشگی متغیرهای بحرانی، Override control بهطور قابلتوجهی ایمنی فرایند را افزایش داده و از بروز شرایط خطرناک جلوگیری میکند.
این استراتژی با اولویتبندی پویا و هوشمند متغیرها بر اساس شرایط لحظهای، به بهینهسازی عملکرد کلی فرایند کمک میکند.
سیستم با تغییر کنترل به بحرانیترین متغیر، میتواند اغتشاشات را مؤثرتر مدیریت کرده و عملکردی پایدار و قابلاعتماد ارائه دهد.
Override control با نگه داشتن متغیرهای حیاتی در محدودههای ایمن، از آسیب دیدن تجهیزات جلوگیری کرده و عمر مفید آنها را افزایش میدهد.
مفهوم کلی کنترل Override را میتوان بهراحتی با استفاده از یک مثال انسانی درک کرد. رانندگان کامیونهای باری باید تعداد زیادی از متغیرها را پایش کرده و بر اساس آنها تصمیمات کنترلی بگیرند؛ از جمله پارامترهای کاری موتور دیزلی و قوانین راهنمایی و رانندگی. یک راننده کامیون باید بهدقت دمای گاز خروجی موتور (Exhaust Gas Temperature) را زیر نظر داشته باشد، زیرا این پارامتر شاخصی پیشرو از احتمال آسیب دیدن موتور است (در صورتی که دمای گاز خروجی از حد مجاز تعیینشده توسط سازنده موتور فراتر رود). در عین حال، همین راننده باید تا حد مجاز قانونی در هر جادهای با بیشترین سرعت ممکن حرکت کند تا زمان حملونقل کاهش یافته و در نتیجه، میزان بار جابهجاشده در بازههای زمانی طولانی به حداکثر برسد. این دو هدف ممکن است در شرایطی مانند حمل بارهای سنگین در مسیرهای شیبدار تند، نظیر عبور از گردنههای کوهستانی، با یکدیگر در تضاد قرار گیرند. در چنین شرایطی، هدف جلوگیری از آسیب دیدن موتور ناگزیر بر هدف حفظ سرعت مجاز جادهای Override میشود.
فرض کنید یک راننده کامیون دیزلی در بزرگراه با سرعت مجاز قانونی حرکت میکند و هر از گاهی به نشانگر EGT (دمای گاز خروجی) روی صفحه ابزار نگاه میاندازد. در شرایط عادی بهرهبرداری، مقدار EGT باید بهمراتب کمتر از حد خطرناک برای موتور باشد. اما پس از کشیدن یک بار کامل از یک گردنه کوهستانی و مشاهده نزدیک شدن EGT به حد بالای مجاز کاری، راننده تصمیم میگیرد توان موتور را بر اساس EGT تنظیم کند، نه بر اساس سرعت جاده. به بیان دیگر، سرعت مجاز قانونی دیگر «نقطه تنظیم (Setpoint)» اصلی برای کنترل نیست و این بار EGT بهعنوان نقطه تنظیم عمل میکند.
اگر بخواهیم فرایند تصمیمگیری راننده کامیون را با اصطلاحات ابزار دقیق و کنترل صنعتی مدلسازی کنیم، نتیجه چیزی شبیه به حالت زیر خواهد بود:
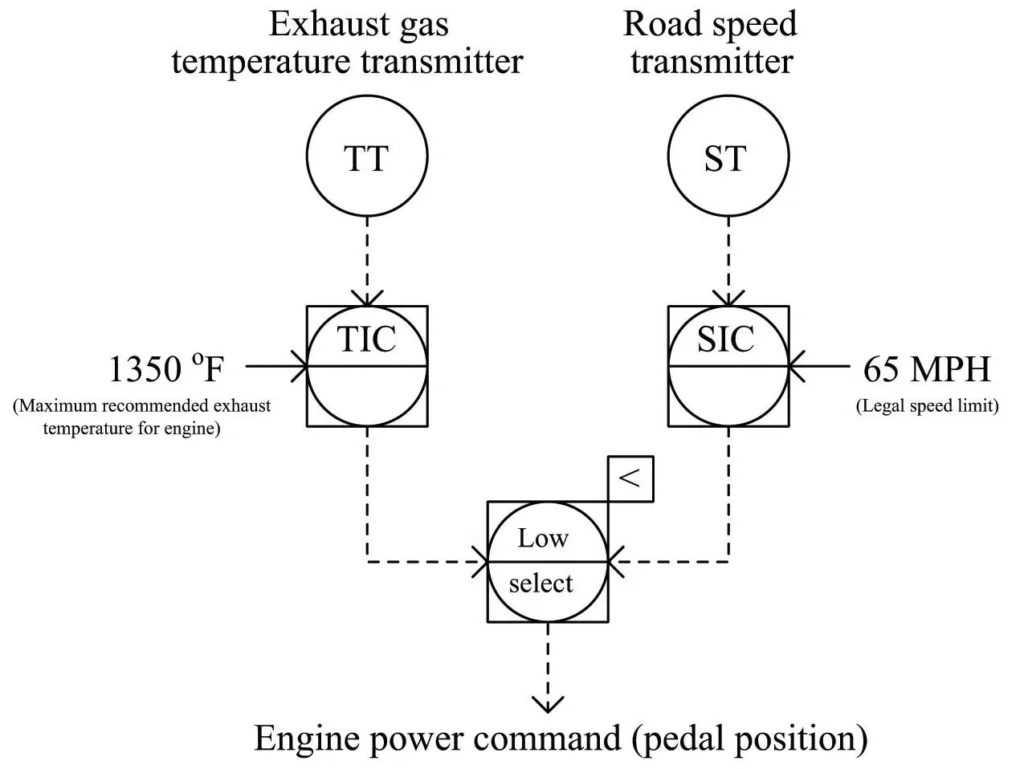
روش کنترل فرآیند Override 1
هر تصمیم کنترلی که کمترین توان خروجی موتور را طلب کند، «برنده انتخاب» شده و کنترل توان موتور را در دست میگیرد.
همانند استراتژیهای کنترل Limit و Selector، در اینجا نیز از یک تابع «Select» برای انتخاب یک سیگنال از میان چند سیگنال استفاده میشود. تفاوت در این است که سیگنالهای انتخابشونده، هر دو خروجی کنترلکنندهها هستند، نه سیگنالهای فرستنده (اندازهگیری) یا نقطه تنظیم. هر دو کنترلکننده همزمان فعال باقی میمانند، اما در هر لحظه فقط یکی از آنها کنترل واقعی فرایند را بر عهده خواهد داشت.
این مدل بهخوبی با مثال راننده کامیون تطابق دارد. با وجود آنکه هدف حفظ سرعت مجاز جادهای به نفع حفظ دمای ایمن گاز خروجی موتور Override شده است، راننده همچنان به سرعت جاده فکر میکند. در واقع، اگر راننده از برنامه زمانی عقب افتاده باشد، میتوان با اطمینان گفت که هدف حفظ سرعت مجاز بزرگراه بههیچوجه فراموش نشده است! حتی ممکن است راننده در طول شیب طولانی بیقرار شود و مشتاق باشد به محض فراهم شدن فرصت، زمان از دسترفته را جبران کند. این موضوع یکی از چالشهای بالقوه در تمامی سیستمهای کنترل Override است: اطمینان از اینکه کنترلکنندهای که انتخاب نشده است، در زمانی که کنترلی بر فرایند ندارد دچار Wind-up (انباشت عمل انتگرالی) نشود.
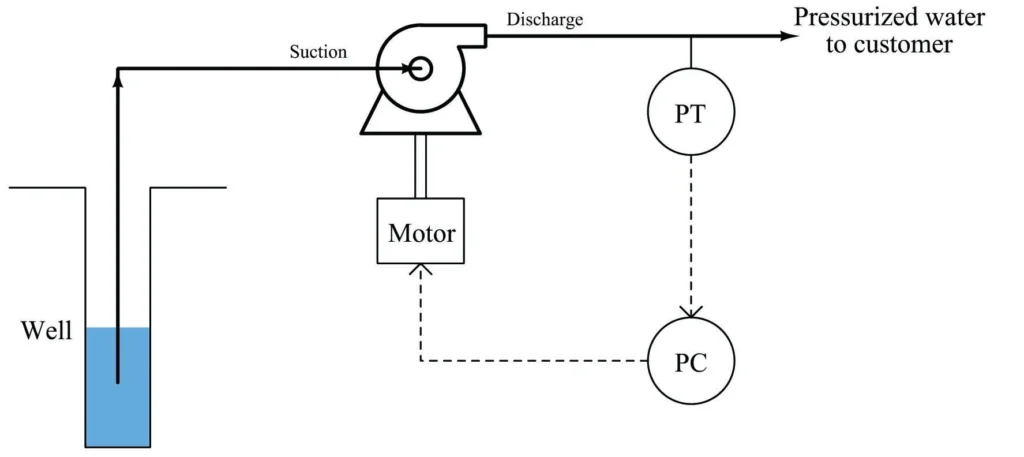
یک نمونه شهری از کنترل Override را میتوان در این سیستم پمپاژ آب مشاهده کرد؛ جایی که یک پمپ آب توسط یک موتور الکتریکی با سرعت متغیر هدایت میشود تا آب را از یک چاه استخراج کرده و فشار آب ثابتی را برای مصرفکننده فراهم کند.
روش کنترل فرآیند Override 2
ضمناً، این یک کاربرد بسیار مناسب برای استفاده از موتور با سرعت متغیر بهعنوان المان نهایی کنترلی بهجای شیر کنترلی است. کاهش سرعت پمپ در شرایط دبی کم، در مقایسه با انرژیای که در یک پمپ با سرعت ثابت و شیر کنترلی هدر میرود، در بلندمدت صرفهجویی قابلتوجهی در مصرف انرژی به همراه خواهد داشت.
یکی از مشکلات بالقوه این سیستم، کارکرد خشک پمپ در صورتی است که سطح آب در چاه بیش از حد کاهش یابد؛ وضعیتی که ممکن است در ماههای تابستان، زمانی که میزان بارندگی کم و تقاضای مصرفکنندگان زیاد است، رخ دهد. اگر پمپ برای مدت طولانی بدون عبور آب از آن کار کند، آببندها (سیلها) دچار آسیب میشوند. این امر نیازمند توقف کامل سیستم و بازسازی پرهزینه پمپ خواهد بود؛ آن هم درست در زمانی که مشتریان بیشترین نیاز را به آن دارند.
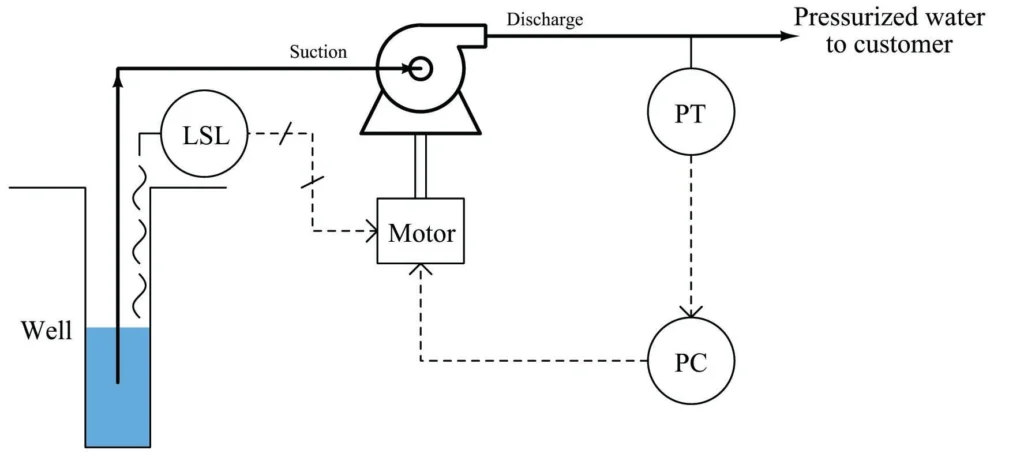
یکی از راهحلهای این مشکل، نصب یک سوئیچ سطح در چاه است که سطح آب را تشخیص داده و در صورتی که سطح آب بیش از حد پایین بیاید، موتور الکتریکی محرک پمپ را خاموش کند:
روش کنترل فرآیند Override 3
این حالت را میتوان نوعی استراتژی Override در نظر گرفت، زیرا سوئیچ سطح پایین، فرمان کنترلکننده فشار برای روشن ماندن پمپ را Override میکند. با این حال، این یک راهحل نسبتاً ابتدایی برای مسئله است؛ چرا که اگرچه از آسیب دیدن پمپ محافظت میکند، اما این کار را به بهای قطع کامل آبرسانی به مصرفکنندگان انجام میدهد. میتوان این استراتژی کنترلی را یک Hard Override system نامید، اصطلاحی که بیانگر اقدام قاطع و بدون انعطاف آن برای حفاظت از پمپ است.
راهحل بهتر برای این چالش آن است که با نزدیک شدن سطح آب چاه به وضعیت سطح پایین، پمپ صرفاً سرعت خود را کاهش دهد. به این ترتیب، پمپ میتواند همچنان به کار خود ادامه دهد (و حداقلی از فشار حفظ شود)، در حالی که با کاهش برداشت از چاه، هم از پمپ در برابر خشککار کردن محافظت میشود و هم خدمات آبرسانی—هرچند بهصورت محدود—برای مصرفکنندگان ادامه مییابد. به این نوع استراتژی، یک Soft Override system گفته میشود.
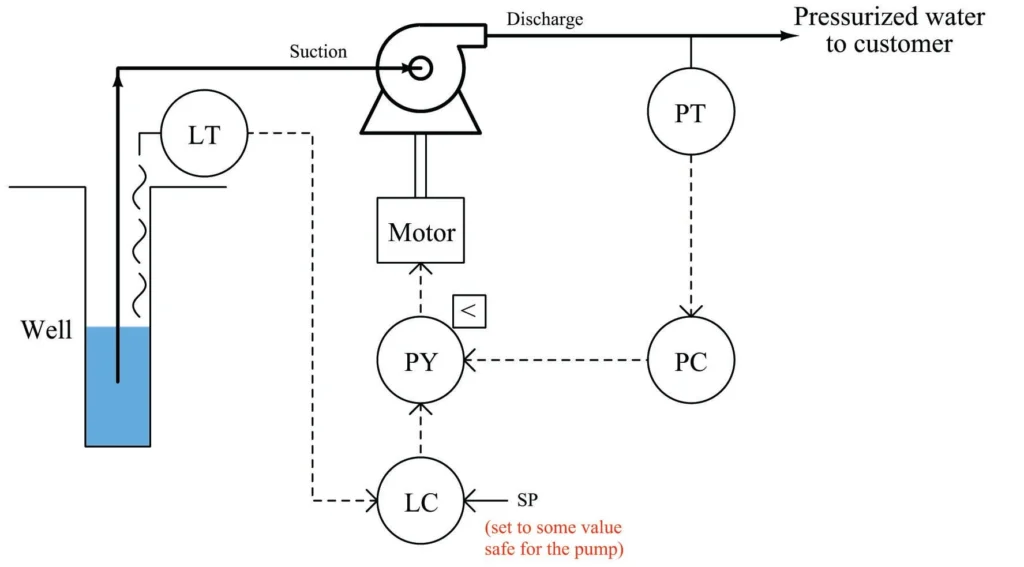
میتوان چنین استراتژی کنترلی را با جایگزین کردن سوئیچ سطح آب چاه با یک Level Transmitter ایجاد کرد؛ بهطوریکه این فرستنده سطح به یک Level Controller متصل شود و سپس از یک رله یا بلاک تابعی Low-Select برای انتخاب کمترین مقدار خروجی بین کنترلکننده فشار و کنترلکننده سطح استفاده گردد. نقطه تنظیم (Setpoint) کنترلکننده سطح، در مقداری پایینتر اما بالاتر از حداقل سطح مجاز برای کارکرد پیوسته پمپ تنظیم میشود:
روش کنترل فرآیند Override 4
هرگاه سطح آب چاه از این نقطه تنظیم پایینتر بیاید، کنترلکننده سطح فرمان کاهش سرعت پمپ را صادر میکند، حتی اگر کنترلکننده فشار درخواست سرعت بالاتری داشته باشد. در این حالت، کنترلکننده سطح، کنترلکننده فشار را Override کرده و با اولویت دادن به افزایش عمر پمپ نسبت به تقاضای مصرفکنندگان عمل میکند.
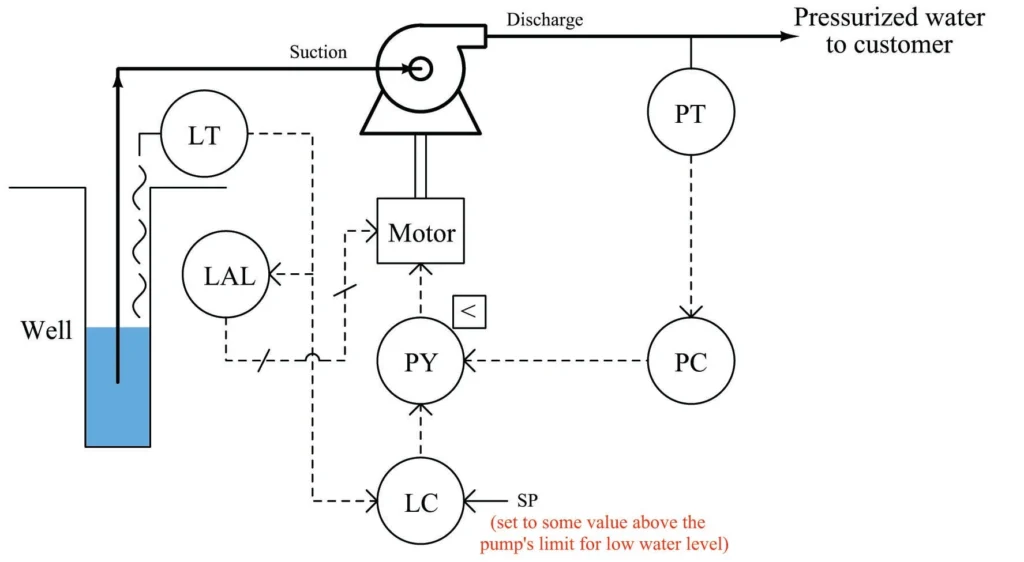
در نظر داشته باشید که ایده استفاده از یک سوئیچ سطح پایین که پمپ را بهطور کامل خاموش میکند، لزوماً ایده بدی نیست. در واقع، ممکن است منطقی باشد که چنین کنترل خاموشی «سخت» (Hard Shutdown) را نیز در سیستم کنترل Override ادغام کنیم؛ تا در صورتی که مشکلی در کنترلکننده سطح (برای مثال تنظیم نادرست نقطه تنظیم یا تیونینگ ضعیف) یا در تابع Low-Select به وجود آمد، از پمپ محافظت شود.
با وجود دو لایه کنترل ایمنی برای پمپ، این سیستم هم یک محدودیت نرم (Soft Constraint) با عملکرد تدریجی و کنترلشده فراهم میکند و هم یک محدودیت سخت (Hard Constraint) با عملکرد قاطع و تهاجمی، تا از کارکرد خشک پمپ جلوگیری شود.
روش کنترل فرآیند Override 5
برای آنکه این دو سطح حفاظت از پمپ به ترتیب صحیح عمل کنند، لازم است نقطه تنظیم کنترلکننده سطح (LC) روی مقداری بالاتر از نقطه تحریک آلارم سطح پایین (LAL) تنظیم شود.
یکی از ملاحظات بسیار مهم در هر استراتژی کنترل Override، نحوه مدیریت Integral Windup است. هر زمان که یک کنترلکننده دارای عمل انتگرالی (Reset) توسط تابع انتخابگر از مدار کنترل خارج (De-selected) شود، ترم انتگرالی آن کنترلکننده بهمرور زمان تمایل به Wind up یا Wind down خواهد داشت. از آنجا که خروجی این کنترلکننده از المان نهایی کنترلی جدا شده است، عملاً هیچ تأثیری بر متغیر فرایند نخواهد داشت. در نتیجه، عمل انتگرالی—که هدف آن بهطور پیوسته هدایت سیگنال خروجی در جهتی است که برابری بین متغیر فرایند و نقطه تنظیم حاصل شود—بیهوده تلاش میکند خطایی را حذف کند که قادر به تأثیرگذاری بر آن نیست. زمانی که کنترل دوباره به آن کنترلکننده بازگردانده شود، عمل انتگرالی ناچار است مدتی را صرف «پیچیدن در جهت مخالف» کند تا اثر انباشتی ایجادشده در زمان خارج بودن از مدار را خنثی نماید.
بنابراین، سیستمهای کنترل Override نیازمند نوعی محدودکننده Integral Windup هستند که هنگام خارج شدن کنترلکننده از مدار فعال شود. روشهای پیادهسازی این قابلیت در بخش پیشین مربوط به کنترلهای Limit (بخش [override_windup] از صفحه …) مورد بررسی قرار گرفتهاند.
Override control یک استراتژی ضروری در بسیاری از فرایندهای صنعتی است که امکان اولویتبندی و مدیریت پویا متغیرهای بحرانی را فراهم میکند. این رویکرد با تضمین ایمنی، افزایش بهرهوری عملیاتی و حفاظت از تجهیزات، به ابزاری بسیار ارزشمند در محیطهای پیچیده و بالقوه خطرناک صنعتی تبدیل شده است.