این یکی از رایجترین پرسشها در رابطه با سیستمهای کنترل و اتوماسیون صنعتی (ICAS) است. برای پاسخ صحیح به این پرسش، لازم است نگاهی کوتاه به تاریخچهی این دو سیستم بیندازیم و اجزای داخلی آنها را بررسی کنیم. در سطح پایه، کنترلکنندههای منطقی قابل برنامهریزی (PLCها) وظیفهی کنترل ماشینها، سیستمها یا دستگاههای تکی را بر عهده دارند، در حالیکه سیستم کنترل توزیعشده (DCS) چندین ماشین را در سراسر یک کارخانه، تأسیسات یا محیط تولیدی مدیریت میکند. در نوشتار به تفاوت های کلیدی PLC و DCS پرداخته می شود.
سیستم DCS همانطور که از نامش پیداست، یک روش کنترلی است که عمدتاً از واحدهای پردازش مرکزی مستقل (CPUها) استفاده میکند. هر CPU مسئول کنترل بخشی از فرایند است، بهگونهای که اگر یکی از آنها از کار بیفتد، CPUهای دیگر همچنان به کار خود ادامه داده و عملکرد کلی سیستم مختل نمیشود.
در مقابل، PLCها بیشتر برای کنترل متمرکز به کار میروند. به این معنا که یک PLC واحد، کنترل کل فرایند را بر عهده دارد. از آنجا که PLC با مکانیزم متمرکز کار میکند، کنترلکننده PLC و تمام عملیات وابسته به آن به همین کنترلکننده متصل هستند. ایراد اصلی این نوع سیستم این است که اگر PLC از کار بیفتد، تمام عملیات مرتبط نیز متوقف میشوند، در حالیکه DCS دارای ساختاری است که این ریسک را کاهش میدهد. از دیدگاه امنیت سایبری نیز، اگر یک PLC مورد نفوذ قرار گیرد، عامل تهدید میتواند اختلال گستردهای در کل سیستمی که تحت کنترل آن PLC است ایجاد کند. به همین دلیل، فناوریهای جدیدی در حال ظهور هستند که تمرکز خود را بر روی بهروزرسانی رویههای احراز هویت قدیمی، که معمولاً در این سیستمها وجود دارند، قرار دادهاند.
هدف اصلی PLCهای اولیه، جایگزینی با سیستمهای کنترل سنتی بود؛ چیزی شبیه به اتاقهای رله که از دههی ۱۹۶۰ به بعد رایج شدند. این سیستمهای قدیمی کاملاً از رلهها و کنتاکتورها تشکیل شده بودند و مدیریت آنها بهشدت دشوار بود. پیمانکاران معمولاً از این سیستمها با عبارتی یاد میکردند که «پنج ساعت زمان برای پیدا کردن مشکل و پنج دقیقه برای رفع آن» لازم است.
سیستمهای DCS چند سال بعد، در اوایل دههی ۱۹۷۰ وارد صحنه شدند؛ نه برای جایگزینی PLCها، بلکه برای پاسخ به نیازهای دیگری که در صنعت اتوماسیون در حال شکلگیری بودند. به همین دلیل، PLC و DCS برای سالهای زیادی در کاربردهای گوناگون در کنار یکدیگر وجود داشتهاند، و هر کدام با توجه به نوع استفاده، مزایا و معایب خاص خود را دارند.
اگرچه PLCهای مدرن در مقایسه با نسخههای اولیهی خود بسیار پیشرفتهتر هستند، اما هنوز هم عمدتاً در اتوماسیون فرایندهای گسسته(discrete) یا کنترل گسسته بهکار میروند. کنترل گسسته شامل کاربردهایی میشود که ورودیها و خروجیها دارای تعداد محدودی وضعیت هستند، معمولاً دو وضعیت، اما گاهی بیشتر؛ مانند روشن/خاموش، درست/نادرست، باز/بسته یا ۰/۱. خط مونتاژ خودرو مثال خوبی در این زمینه است که بیشتر از سیگنالهای دیجیتال و تعداد محدودی سیگنال آنالوگ استفاده میکند.

اتاق های رله در گذشته دور و پیش از ورود PLC
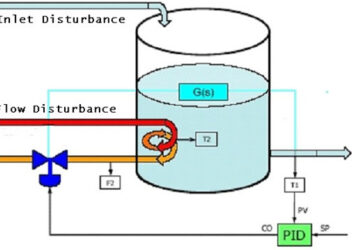
سیستم DCS برای فرایندهای پیوسته مناسبتر است؛ فرایندهایی که شامل چندین سیگنال آنالوگ و حلقههای کنترل پیچیدهتری مانند حلقههای PID (تناسبی، انتگرالی، مشتقی) هستند. این نوع کنترلها بیشتر در نیروگاهها و پالایشگاهها دیده میشوند. به همین دلیل، زمان واکنش یا چرخهی اسکن (Scan Cycle) در DCS نسبت به PLCها ممکن است بیشتر باشد، زیرا فرایندهایی که DCS کنترل میکند نیازمند پردازشهای سنگینتری هستند.
علاوه بر این، DCS اغلب از زبانهای برنامهنویسی سطح بالا مانند Continuous Function Chart (CFC) استفاده میکند. این زبانها برای برنامهنویسیهای پیچیده، پایش و اقدامات مهندسی که نیازمند توابع از پیشتعریفشدهی زیادی هستند بسیار مفیدند، اما پس از کامپایل شدن، کدهای حجیمی تولید میکنند که فشار زیادی بر CPUها وارد کرده و میتواند باعث کندی واکنش سیستم نسبت به ورودیهای حیاتی شود.
در مقابل، PLCها معمولاً از زبانهای برنامهنویسی سطح پایینتری مانند Function Block Diagram (FBD)، Structured Text (STL) یا Ladder Logic (LAD) استفاده میکنند. کدی که با این زبانها تولید میشود، بسیار سبکتر بوده و بیشتر با زبان ماشین تطابق دارد. به همین دلیل، PLCها اغلب برای پشتیبانی یا پشتیبانگیری از سیستمها بهکار میروند، مخصوصاً در مواردی که نیاز به واکنش سریع است.
یکی دیگر از تفاوتهای کلیدی بین DCS و PLC در سیستمهای مانیتورینگ آنها قابل مشاهده است. در سیستم DCS، یک بسته نرمافزاری یکپارچه وجود دارد که مجموعه کاملی از امکانات مانیتورینگ را در بر میگیرد. این به معنای آن است که نظارت، کنترل و برنامهنویسی همگی در یک محیط متحد و هماهنگ انجام میشود.
در مقابل، در سیستمهای PLC معمولاً هیچ ارتباط مستقیمی بین محیط برنامهنویسی و محیط پایش یا مانیتورینگ وجود ندارد، و این سیستمها اغلب نیازمند طراحی و توسعه مجزای محیط پایش توسط خود کاربر یا برنامه نویس هستند. به همین دلیل است که PLCها اغلب بهعنوان یک «صفحه سفید» با معماری باز (Open Architecture) شناخته میشوند، در حالیکه DCS بیشتر شبیه به راهحلهای آماده (Turnkey Solution) است؛ یعنی سیستمهایی که بهصورت کامل و از پیشساخته ارائه شده و آمادهی پیادهسازی هستند.
در مجموع، سیستمهای DCS نسبت به PLCها از قابلیت اطمینان بالاتری برخوردارند. این مسئله صرفاً به خاطر ماهیت توزیعشده یا غیرمتمرکز آنها نیست، بلکه به دلیل بهرهگیری از مهندسی افزونهسازی (Redundancy) در سطوح مختلف است. افزونهسازی با استفاده از پردازندههای پشتیبان در صورت بروز خطا در پردازنده اصلی، باعث افزایش اطمینان سیستم میشود. این موضوع به دو دلیل حیاتی است:
سطوح افزونهسازی در DCS شامل واحدهای پردازشگر (CPU)، منبع تغذیه، سرورها، سوئیچهای شبکه و کابلهای شبکه است، که همگی میتوانند بهصورت مستقل در صورت خرابی مدیریت شوند.
از طرفی، با توجه به اینکه زمان واکنش DCS بیشتر از PLC است، DCS برای فرایندهایی که دارای سیگنالهای آنالوگ متعدد و حلقههای PID هستند مناسبتر است. در مقابل، PLCها برای فرایندهایی که بیشتر با سیگنالهای گسسته و تعداد کمی سیگنال آنالوگ سر و کار دارند، انتخاب بهتری هستند.
در DCS، اپراتورها از توابع از پیشتعریفشده و زبانهای برنامهنویسی سطح بالا بهره میبرند، در حالی که در PLC معمولاً لازم است بسیاری از توابع بهصورت دستی نوشته و تعریف شوند. همچنین، معماری شبکه در DCS سادهتر و به کمک بستههای سختافزاری و نرمافزاری یکپارچه پیادهسازی میشود.
با این حال، هزینه سختافزار و نرمافزار DCS بسیار بیشتر از PLCهاست و از نظر انعطافپذیری نیز محدودتر هستند. بهطور خلاصه:
به همین دلیل، PLCها همچنان بخش جدانشدنی از سیستمهای کنترل صنعتی (ICS) باقی ماندهاند، چه در سیستمهای متمرکز و چه غیرمتمرکز.