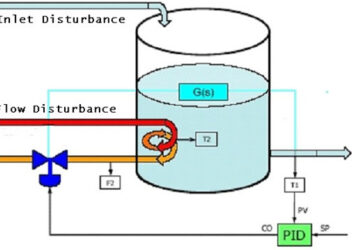
در سیستمهای کنترل فرآیند، شیر باید دقیقاً در موقعیت صحیح باز شود تا دبی، فشار، دما یا سطح در مقدار مطلوب حفظ گردد. با این حال، اصطکاک، تغییرات فشار فرآیند و محدودیتهای عملگر میتوانند باعث شوند شیر از موقعیت موردنظر منحرف شود. بر اساس اصل کار پوزیشنر شیر کنترلی، از پوزیشنر برای اصلاح این وضعیت استفاده میشود؛ به این صورت که با تنظیم فشار هوای ورودی به عملگر، اطمینان حاصل میکند شیر دقیقاً به موقعیت مطلوب برسد.
پوزیشنر شیر کنترلی تجهیزی است که تضمین میکند ساقه شیر مطابق با سیگنال کنترلی ورودی، به موقعیت دقیق موردنظر برسد. این دستگاه بهطور پیوسته فشار هوای تأمینشده به عملگر را تنظیم میکند تا زمانی که شیر به موقعیت صحیح دست یابد.
وظیفه اصلی پوزیشنر شیر عبارت است از:
به بیان ساده: پوزیشنر تضمین میکند شیر دقیقاً به همان موقعیتی برود که کنترلر از آن میخواهد.
از پوزیشنر در شرایط زیر استفاده میشود:
| شرایط | دلیل |
| نیاز به موقعیتیابی دقیق شیر | کاهش خطا و هیسترزیس |
| کورس حرکتی زیاد عملگر | تضمین پاسخ سریع |
| اصطکاک یا بار زیاد در شیر | کمک به غلبه بر مقاومت |
| طول زیاد لولههای پنوماتیکی | جلوگیری از حرکت کند یا گیرکردن |
| کنترل در فشارهای متغیر فرآیند | حفظ پایداری سیستم |
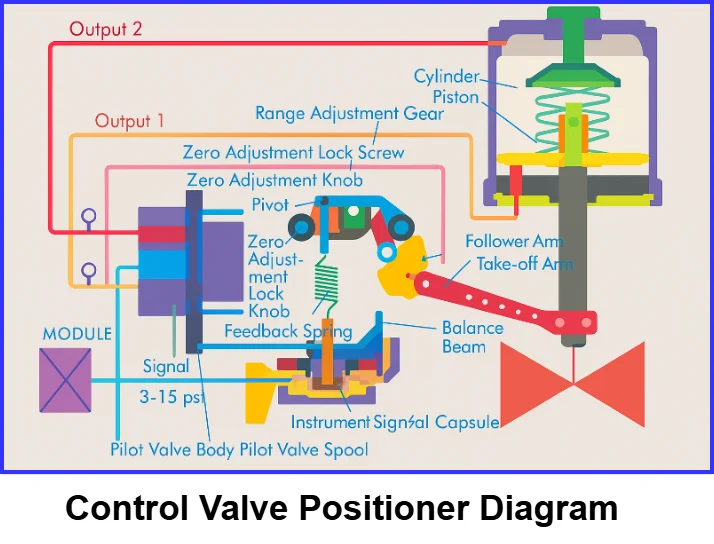
شکل داخلی پوزیشنر شیر کنترل
اصل کار پوزیشنر شیر کنترل بر پایه مکانیزم تعادل نیرو (Force-Balance) بین موارد زیر است:
کنترلکننده فرآیند یک سیگنال پنوماتیکی (۳–۱۵ psi) یا الکتریکی (۴–۲۰ mA) به پوزیشنر ارسال میکند.
پوزیشنر سیگنال دریافتی از کنترلکننده را با بازخورد مکانیکی موقعیت ساقه شیر مقایسه میکند.
اگر شیر در موقعیت موردنیاز نباشد، پوزیشنر فشار هوای عملگر را تنظیم میکند.
پوزیشنر با باز یا بسته کردن مسیرهای داخلی هوا:
با حرکت شیر، مکانیزم فیدبک موقعیت جدید را به پوزیشنر منتقل میکند.
زمانی که موقعیت واقعی شیر برابر با موقعیت درخواستی شود، پوزیشنر تنظیم فشار هوا را متوقف میکند.
این حلقه بازخورد پیوسته تضمین میکند که کنترل با دقت بالا و در هر لحظه انجام شود.
| نوع | توضیح | نوع سیگنال |
| پوزیشنر پنوماتیکی | از فشار هوا برای کنترل استفاده میکند | ۳–۱۵ psi |
| پوزیشنر الکتروپنوماتیکی (EP) | سیگنال الکتریکی ۴–۲۰mA را به فشار پنوماتیکی تبدیل میکند | الکتریکی + هوا |
| پوزیشنر دیجیتال / هوشمند | مبتنی بر میکروپروسسور با قابلیت تنظیم خودکار | ۴–۲۰mA + HART / Fieldbus / Profibus |
مجموعه پوزیشنر شیر کنترل معمولاً از یک تقویتکننده با بهره بالا (که میتواند پنوماتیکی، الکتروپنوماتیکی یا دیجیتال باشد) و یک مکانیزم بازخورد مکانیکی تشکیل شده است که بهطور مداوم موقعیت واقعی ساقه شیر را پایش میکند. این اجزا با همکاری یکدیگر تضمین میکنند که شیر دقیقاً به موقعیتی که کنترلکننده درخواست کرده است، حرکت کند.
زمانی که سیگنال کنترلکننده نشان دهد که شیر باید بسته شود، فشار ورودی به بلوز یا دیافراگم کاهش مییابد. با کاهش این فشار سیگنال، فلپر از نازل فاصله میگیرد و در نتیجه فشار برگشتی نازل (Nozzle Back Pressure) کاهش پیدا میکند. این کاهش فشار برگشتی باعث افت فشار داخل دیافراگم عملگر شده و در نتیجه ساقه شیر به سمت پایین حرکت کرده و فرآیند بسته شدن آغاز میشود.
همزمان با شروع بسته شدن شیر، بازوی فیدبک متصل به ساقه شیر نیز حرکت میکند. این حرکت باعث چرخش بادامک (Cam) در جهت ساعتگرد میشود که بهتدریج فشار برگشتی نازل را افزایش میدهد. این افزایش فشار، تغییر اولیه فشار ناشی از سیگنال کنترلکننده را خنثی کرده و تعادل برقرار میشود.
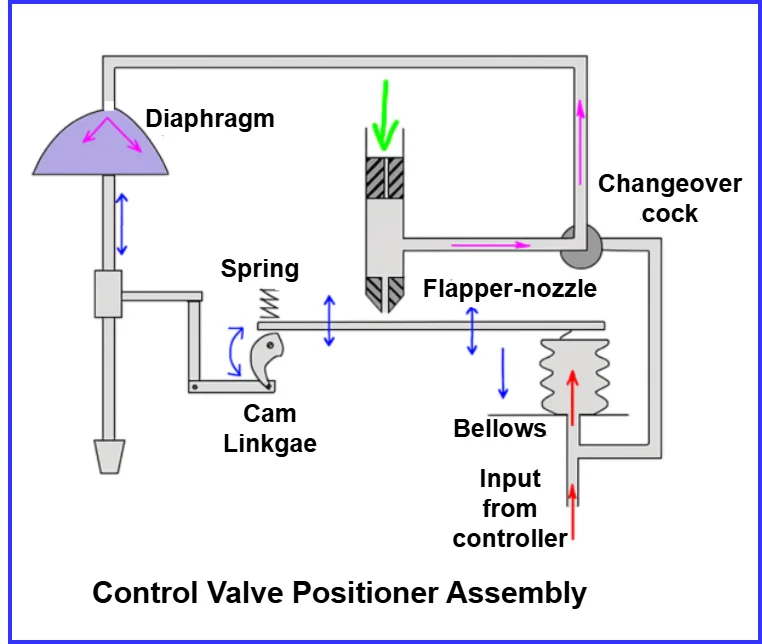
مونتاژ پوزیشنر شیر کنترل
در نهایت، نقطهای فرا میرسد که نیروهای دو طرف (نیروی سیگنال و نیروی فیدبک) با یکدیگر برابر میشوند و سیستم به حالت تعادل بازمیگردد. در این لحظه، حرکت شیر متوقف شده و در موقعیتی پایدار و دقیق ثابت میماند.
علاوه بر این، بسیاری از مجموعههای پوزیشنر دارای یک شیر تغییر مسیر (Change-over Cock) هستند. این قابلیت امکان میدهد در صورت نیاز، سیگنال کنترلکننده مستقیماً به دیافراگم عملگر اعمال شود—بهعبارتی پوزیشنر در زمان تعمیرات یا عیبیابی از مدار خارج (Bypass) میشود.
پوزیشنر شیر کنترل از چندین جزء مکانیکی و پنوماتیکی تشکیل شده است که با همکاری یکدیگر حرکت ساقه شیر را با دقت کنترل میکنند. اجزای اصلی پوزیشنر عبارتند از:
این بخش هسته اصلی تبدیل حرکات مکانیکی کوچک به تغییرات فشار است. هنگامی که فلپر به نازل نزدیک یا از آن دور میشود، فشار برگشتی در خط هوای تغذیه تغییر میکند. این تغییر فشار به پوزیشنر اجازه میدهد حرکت عملگر را با دقت تنظیم کند.
رله (یا شیر پایلوت) سیگنال فشار کوچک ایجادشده توسط مجموعه فلپر–نازل را تقویت کرده و آن را به فشار خروجی بزرگتری تبدیل میکند. این بخش تضمین میکند که حجم و فشار هوای کافی برای حرکت سریع و دقیق شیر به عملگر برسد.
دیافراگم یا بلوز سیگنال کنترلی ورودی (پنوماتیکی یا سیگنال الکتریکی تبدیلشده) را دریافت میکند. حرکت آن نیروی محرک اصلی برای شروع فرآیند موقعیتدهی است و به تغییرات فشار سیگنال واکنش نشان میدهد.
این مکانیزم بازخورد مکانیکی موقعیت واقعی ساقه شیر را فراهم میکند. با حرکت شیر، کشش فنر فیدبک تغییر میکند و به پوزیشنر امکان میدهد موقعیت واقعی را بهطور مداوم با مقدار درخواستی مقایسه کرده و هرگونه خطا را اصلاح کند.
این پورتها هوای فشرده را به پوزیشنر و عملگر میرسانند و با کنترل جهت و فشار جریان هوا، حرکت نرم و کنترلشده شیر را تضمین میکنند.
بادامک تعیین میکند که حرکت شیر چگونه با درصد سیگنال ورودی مرتبط باشد. با تغییر پروفایل بادامک میتوان مشخصههای کنترلی مختلفی مانند خطی، درصد مساوی یا بازشدگی سریع را به دست آورد.
پوزیشنرهای دیجیتال دارای یک میکروپروسسور داخلی هستند که سیگنالهای الکتریکی (۴–۲۰ mA) را تفسیر میکند، عیبیابی خودکار انجام میدهد، کالیبراسیون خودکار را اجرا میکند و امکان ارتباط از طریق پروتکلهایی مانند HART، Fieldbus یا Profibus را فراهم میسازد.
پوزیشنر شیر کنترل در همه کاربردها ضروری نیست، اما زمانی که حرکت دقیق و پایدار شیر موردنیاز باشد، به یک تجهیز حیاتی تبدیل میشود. در شرایط عملیاتی زیر باید نصب پوزیشنر را مدنظر قرار داد:
پوزیشنر هیسترزیس و اثرات اصطکاک را حذف کرده و تضمین میکند ساقه شیر دقیقاً به موقعیت درخواستی برسد.
از آنجا که پوزیشنر فشار و حجم هوای بیشتری تأمین میکند، شیر میتواند سریعتر به تغییرات سیگنال کنترلی پاسخ دهد.
پوزیشنر میتواند بهعنوان تقویتکننده پنوماتیکی عمل کند و به عملگر کمک کند در برابر فشار تفاضلی بالا شیر را باز یا بسته نماید.
اگر افت فشار در شیرهای تکسیت بیش از ۵ بار یا در شیرهای دوسیت بیش از ۱۰ بار باشد، پوزیشنر به حفظ عملکرد پایدار کمک میکند.
پوزیشنر به خطیسازی حرکت شیر کمک کرده و قابلیت کنترل فرآیند را بهبود میبخشد.
زمانی که فشار تفاضلی تغییر میکند، پوزیشنر بهصورت خودکار جبران کرده و موقعیت صحیح پلاگ را حفظ میکند.
پوزیشنر دقت کنترل را در کاربردهایی که نیاز به مدولاسیون دقیق در کل کورس حرکت شیر دارند افزایش میدهد.
این سیالات ممکن است باعث گیرکردن یا ایجاد اصطکاک در ساقه شوند؛ پوزیشنر توان لازم برای غلبه بر این مقاومت را فراهم میکند.
کالیبراسیون تضمین میکند که پوزیشنر شیر، موقعیت ساقه شیر را بهطور دقیق با سیگنال کنترلی ورودی هماهنگ کند. برای انجام یک کالیبراسیون پایه، مراحل زیر را دنبال کنید:
بررسی کنید که فشار هوای ورودی در محدوده توصیهشده سازنده باشد و هوا تمیز و خشک باشد. هوای آلوده یا فشار ناکافی میتواند باعث کالیبراسیون نادرست و حرکت ناپایدار شیر شود.
کالیبراسیون را با اعمال حداقل سیگنال ورودی به پوزیشنر آغاز کنید.
در این مرحله، شیر باید در نزدیکی وضعیت کاملاً بسته یا موقعیت ابتدایی خود باشد.
با استفاده از پیچ تنظیم صفر، شیر را طوری تنظیم کنید که درست از موقعیت بسته یا ابتدایی خود شروع به حرکت کند.
این کار پاسخ دقیق در ابتدای کورس حرکت را تضمین میکند.
سپس حداکثر سیگنال ورودی را اعمال کنید:
در این حالت، شیر باید نزدیک به موقعیت کاملاً باز یا حداکثر کورس حرکت خود قرار گیرد.
با استفاده از تنظیم اسپن، کورس حرکت شیر را اصلاح کنید تا بهدرستی به انتهای کورس کامل برسد.
این تنظیم، رابطه بین بازه سیگنال ورودی و حرکت مکانیکی کامل شیر را تعیین میکند.
شیر را با اعمال مقادیر میانی (مثلاً ۸ mA، ۱۲ mA، ۱۶ mA) در سیکلهای مختلف حرکت دهید. بررسی کنید که:
اگر موقعیتیابی ناپایدار باشد، تنظیمات ظریف صفر و اسپن را تکرار کنید تا حرکت دقیق و تکرارپذیر حاصل شود.
اصل کار پوزیشنر شیر کنترل بر تنظیم مداوم فشار هوا برای تطبیق موقعیت ساقه شیر با مقدار درخواستی استوار است. بدون پوزیشنر، شیرهای کنترل ممکن است به دلیل اصطکاک یا اغتشاشات فرآیندی دچار عدم دقت، کندی یا ناپایداری شوند. بنابراین، در سیستمهای مدرن کنترل فرآیند، پوزیشنرها برای دستیابی به دقت بالا، پاسخ سریع و تنظیم پایدار، تجهیزی ضروری محسوب میشوند.