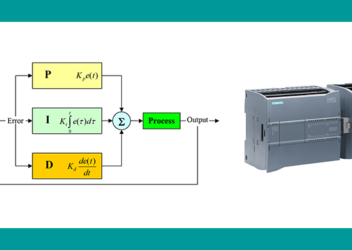
کنترل PID آبشاری (Cascade PID Control) یک کاربرد پیشرفته از کنترل PID است که میتواند برای بهبود عملکرد یک سیستم کنترل فرایند بهکار گرفته شود. گاهی اوقات یک فرایند بهقدری حساس و بحرانی است که بروز اغتشاشاتی که باعث انحراف قابلتوجه متغیر فرایند از نقطه تنظیم (Setpoint) شود، قابل قبول نیست. در برخی از این سیستمها، استفاده از یک کنترلکننده PID تکحلقهای برای نگه داشتن سیستم در محدوده مجاز عملکرد کافی نیست؛ در چنین شرایطی یک حلقه ثانویه به نام حلقه تابع (Slave Loop) به سیستم افزوده میشود.
تا دهههای ۱۹۷۰ و ۱۹۸۰، با معرفی سیستمهای کنترل دیجیتال، پیادهسازی کنترل PID آبشاری دچار تحول اساسی شد و امکان پیکربندیهای پیچیدهتر و تنظیم آسانتر را فراهم کرد. توسعه سیستمهای کنترل توزیعشده (DCS) نیز قابلیتهای کنترل آبشاری را بیش از پیش ارتقا داد، بهگونهای که یکپارچهسازی بدون وقفه چندین حلقه کنترلی در سراسر فرایندهای صنعتی امکانپذیر شد. بهطور کلی، در کنترل PID آبشاری دو یا چند حلقه وجود دارد که شامل حلقه اصلی یا مستر (Master Loop) و حلقه(های) ثانویه یا اسلیو میباشند. خروجی حلقه مستر معمولاً بهعنوان نقطه تنظیم حلقه اسلیو مورد استفاده قرار میگیرد.
متغیر فرایند در حلقه اسلیو معمولاً دارای دینامیک سریعتری است (معمولاً سه تا پنج برابر سریعتر). این متغیر اغتشاشات سیستم را بهسرعت تشخیص داده و بهگونهای واکنش نشان میدهد که اثر اغتشاش بر حلقه مستر به حداقل برسد. در این تنظیمات، کنترل کننده اصلی (Master) مستقیماً روی عنصر کنترل نهایی عمل نمی کند. در عوض، نقطه تنظیم یک کنترلر ثانویه (Slave) را تنظیم می کند، که سپس تنظیمات نهایی را انجام می دهد.
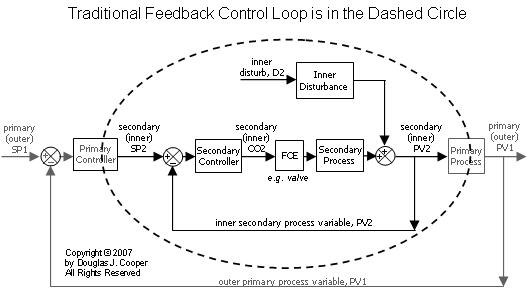
مفهوم کنترل PID آبشاری
SP2 = نقطه تنظیم داخلی حلقه ثانویه
CO2 = سیگنال خروجی کنترلکننده داخلی حلقه ثانویه
PV2 = سیگنال اندازهگیریشده متغیر فرایند داخلی حلقه ثانویه
و
D2 = متغیر اغتشاش داخلی (معمولاً اندازهگیری نمیشود یا بهصورت سیگنال در دسترس نیست)
FCE = المان نهایی کنترلی، مانند شیر کنترلی، پمپ با سرعت متغیر، کمپرسور و …
کنترل آبشاری (Cascade) به طور گسترده در صنایعی مانند مواد شیمیایی، نفت و گاز، تولید برق و فرآوری مواد غذایی مورد استفاده قرار می گیرد – جایی که دقت واقعا مهم است.
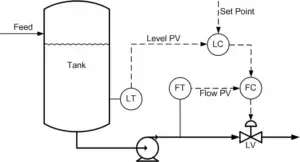
نمونه کاربرد cascade pid
یک نمونه کاربرد را در نظر بگیرید که دیاگرام P&ID آن در بالا نشان داده شده است. در این سیستم دو متغیر فرایندی وجود دارد: سطح (Level) و دبی (Flow). کنترل سطح، حلقه مستر است؛ کنترل دبی، حلقه اسلیو بوده و شیر کنترل دبی متغیر کنترلی سیستم محسوب میشود.
فرستنده دبی (Flow Transmitter) تغییر در نرخ جریان را تشخیص میدهد که در نهایت میتواند باعث اختلال و انحراف سطح فرایند از نقطه تنظیم شود. فرستنده دبی بهسرعت واکنش نشان میدهد و حلقه کنترلی آن باعث عملکرد شیر کنترل دبی میگردد تا اثر اغتشاش بر سطح فرایند به حداقل برسد.
کاربرد دیگری که ممکن است نیاز به استفاده از کنترل PID آبشاری داشته باشد، حالتی است که دو یا چند متغیر فرایندی وجود دارد، اما تنها یک متغیر کنترلی در دسترس است.
برای پیاده سازی کنترل PID آبشاری در نرم افزار PCS7 زیمنس به لینک زیر مراجعه کنید.